


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
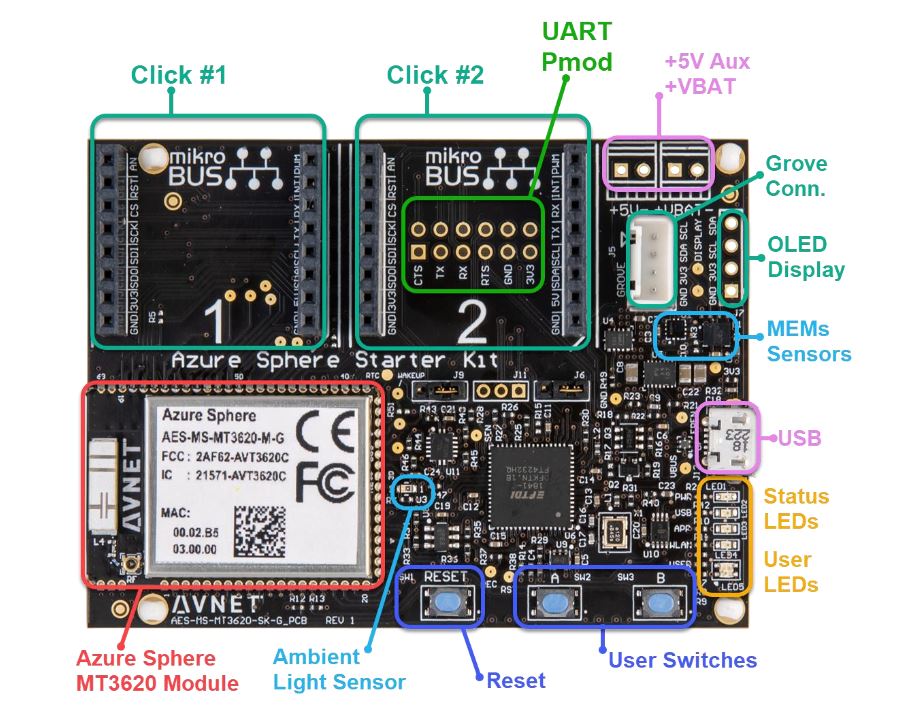
Azure IoT Farming, its build with Microsoft Azure Sphere MT3620 IoT Kit. The Idea of this project is to control the water flow and lights via cloud.
At the 1st step ordered the Azure Sphere MT3620 board from element14 website. After receiving the kit I started with basic intro and examples provided on the element14 community blogs.
I followed the tutorials from element14 blogs
able to finish the out of box demo with IoT Hub and IoT Central Application. Moving forward I decided to implement android app for Farming. I referred many docs but couldn't get what I want to implement with android. Anyway the other side I have interfaced CMOS Switches board to Azure Sphere kit to control 12V load. OLED I have connected to the board and modified some of the screens as per my requirements.
OLED Pin Connections:
Relay Pins:
Initial setup for the board is setup with Azure Sphere Developer Command-Line tool. (Microsoft Azure Sphere SDK)
Cloud side I was running IoT Central application :
I was not sure but mostly last two months my board is connected to azure cloud, in between the account free services expired, I came to know after 15days only then again activated the service and running now.
With the help of Dashboard Settings switches I could control the load from cloud. It was very fast. Also I tried to create another client application with node js to read the switch status and monitor the sensors values
The working demo is here
/* Copyright (c) Microsoft Corporation. All rights reserved.
Licensed under the MIT License. */
/************************************************************************************************
Name: AvnetStarterKitReferenceDesign
Sphere OS: 19.05
This file contains the 'main' function. Program execution begins and ends there
Authors:
Peter Fenn (Avnet Engineering & Technology)
Brian Willess (Avnet Engineering & Technology)
Purpose:
Using the Avnet Azure Sphere Starter Kit demonstrate the following features
1. Read X,Y,Z accelerometer data from the onboard LSM6DSO device using the I2C Interface
2. Read X,Y,Z Angular rate data from the onboard LSM6DSO device using the I2C Interface
3. Read the barometric pressure from the onboard LPS22HH device using the I2C Interface
4. Read the temperature from the onboard LPS22HH device using the I2C Interface
5. Read the state of the A and B buttons
6. Read BSSID address, Wi-Fi AP SSID, Wi-Fi Frequency
*************************************************************************************************
Connected application features: When connected to Azure IoT Hub or IoT Central
*************************************************************************************************
7. Send X,Y,Z accelerometer data to Azure
8. Send barometric pressure data to Azure
9. Send button state data to Azure
10. Send BSSID address, Wi-Fi AP SSID, Wi-Fi Frequency data to Azure
11. Send the application version string to Azure
12. Control user RGB LEDs from the cloud using device twin properties
13. Control optional Relay Click relays from the cloud using device twin properties
14. Send Application version up as a device twin property
TODO
1. Add support for a OLED display
2. Add supprt for on-board light sensor
*************************************************************************************************/
#include <errno.h>
#include <signal.h>
#include <stdbool.h>
#include <stdlib.h>
#include <string.h>
#include <time.h>
#include <unistd.h>
#include <stdio.h>
#include <math.h>
// applibs_versions.h defines the API struct versions to use for applibs APIs.
#include "applibs_versions.h"
#include "epoll_timerfd_utilities.h"
#include "i2c.h"
#include "mt3620_avnet_dev.h"
#include "deviceTwin.h"
#include "azure_iot_utilities.h"
#include "connection_strings.h"
#include "build_options.h"
#include <applibs/log.h>
#include <applibs/i2c.h>
#include <applibs/gpio.h>
#include <applibs/wificonfig.h>
#include <azureiot/iothub_device_client_ll.h>
//// OLED
#include "oled.h"
//// ADC connection
#include <sys/time.h>
#include <sys/socket.h>
#include <applibs/application.h>
// Provide local access to variables in other files
extern twin_t twinArray[];
extern int twinArraySize;
extern IOTHUB_DEVICE_CLIENT_LL_HANDLE iothubClientHandle;
// Support functions.
static void TerminationHandler(int signalNumber);
static int InitPeripheralsAndHandlers(void);
static void ClosePeripheralsAndHandlers(void);
// File descriptors - initialized to invalid value
int epollFd = -1;
static int buttonPollTimerFd = -1;
static int buttonAGpioFd = -1;
static int buttonBGpioFd = -1;
int userLedRedFd = -1;
int userLedGreenFd = -1;
int userLedBlueFd = -1;
int appLedFd = -1;
int wifiLedFd = -1;
int clickSocket1Relay1Fd = -1;
int clickSocket1Relay2Fd = -1;
//// ADC connection
static const char rtAppComponentId[] = "005180bc-402f-4cb3-a662-72937dbcde47";
static int sockFd = -1;
static void SendMessageToRTCore(void);
static void TimerEventHandler(EventData *eventData);
static void SocketEventHandler(EventData *eventData);
static int timerFd = -1;
uint8_t RTCore_status;
// event handler data structures. Only the event handler field needs to be populated.
static EventData timerEventData = { .eventHandler = &TimerEventHandler };
static EventData socketEventData = { .eventHandler = &SocketEventHandler };
//// end ADC connection
// Button state variables, initilize them to button not-pressed (High)
static GPIO_Value_Type buttonAState = GPIO_Value_High;
static GPIO_Value_Type buttonBState = GPIO_Value_High;
#if (defined(IOT_CENTRAL_APPLICATION) || defined(IOT_HUB_APPLICATION))
bool versionStringSent = false;
#endif
// Define the Json string format for the accelerator button press data
static const char cstrButtonTelemetryJson[] = "{\"%s\":\"%d\"}";
// Termination state
volatile sig_atomic_t terminationRequired = false;
/// <summary>
/// Signal handler for termination requests. This handler must be async-signal-safe.
/// </summary>
static void TerminationHandler(int signalNumber)
{
// Don't use Log_Debug here, as it is not guaranteed to be async-signal-safe.
terminationRequired = true;
}
/// <summary>
/// Handle button timer event: if the button is pressed, report the event to the IoT Hub.
/// </summary>
static void ButtonTimerEventHandler(EventData *eventData)
{
bool sendTelemetryButtonA = false;
bool sendTelemetryButtonB = false;
if (ConsumeTimerFdEvent(buttonPollTimerFd) != 0) {
terminationRequired = true;
return;
}
// Check for button A press
GPIO_Value_Type newButtonAState;
int result = GPIO_GetValue(buttonAGpioFd, &newButtonAState);
if (result != 0) {
Log_Debug("ERROR: Could not read button GPIO: %s (%d).\n", strerror(errno), errno);
terminationRequired = true;
return;
}
// If the A button has just been pressed, send a telemetry message
// The button has GPIO_Value_Low when pressed and GPIO_Value_High when released
if (newButtonAState != buttonAState) {
if (newButtonAState == GPIO_Value_Low) {
Log_Debug("Button A pressed!\n");
sendTelemetryButtonA = true;
}
else {
Log_Debug("Button A released!\n");
}
// Update the static variable to use next time we enter this routine
buttonAState = newButtonAState;
}
// Check for button B press
GPIO_Value_Type newButtonBState;
result = GPIO_GetValue(buttonBGpioFd, &newButtonBState);
if (result != 0) {
Log_Debug("ERROR: Could not read button GPIO: %s (%d).\n", strerror(errno), errno);
terminationRequired = true;
return;
}
// If the B button has just been pressed/released, send a telemetry message
// The button has GPIO_Value_Low when pressed and GPIO_Value_High when released
if (newButtonBState != buttonBState) {
if (newButtonBState == GPIO_Value_Low) {
// Send Telemetry here
Log_Debug("Button B pressed!\n");
sendTelemetryButtonB = true;
//// OLED
oled_state++;
if (oled_state > OLED_NUM_SCREEN)
{
oled_state = 0;
}
}
else {
Log_Debug("Button B released!\n");
}
// Update the static variable to use next time we enter this routine
buttonBState = newButtonBState;
}
// If either button was pressed, then enter the code to send the telemetry message
if (sendTelemetryButtonA || sendTelemetryButtonB) {
char *pjsonBuffer = (char *)malloc(JSON_BUFFER_SIZE);
if (pjsonBuffer == NULL) {
Log_Debug("ERROR: not enough memory to send telemetry");
}
if (sendTelemetryButtonA) {
// construct the telemetry message for Button A
snprintf(pjsonBuffer, JSON_BUFFER_SIZE, cstrButtonTelemetryJson, "buttonA", newButtonAState);
Log_Debug("\n[Info] Sending telemetry %s\n", pjsonBuffer);
AzureIoT_SendMessage(pjsonBuffer);
}
if (sendTelemetryButtonB) {
// construct the telemetry message for Button B
snprintf(pjsonBuffer, JSON_BUFFER_SIZE, cstrButtonTelemetryJson, "buttonB", newButtonBState);
Log_Debug("\n[Info] Sending telemetry %s\n", pjsonBuffer);
AzureIoT_SendMessage(pjsonBuffer);
}
free(pjsonBuffer);
}
}
// event handler data structures. Only the event handler field needs to be populated.
static EventData buttonEventData = { .eventHandler = &ButtonTimerEventHandler };
//// ADC connection
/// <summary>
/// Handle socket event by reading incoming data from real-time capable application.
/// </summary>
static void SocketEventHandler(EventData *eventData)
{
// Read response from real-time capable application.
char rxBuf[32];
union Analog_data
{
uint32_t u32;
uint8_t u8[4];
} analog_data;
int bytesReceived = recv(sockFd, rxBuf, sizeof(rxBuf), 0);
if (bytesReceived == -1) {
Log_Debug("ERROR: Unable to receive message: %d (%s)\n", errno, strerror(errno));
terminationRequired = true;
}
// Copy data from Rx buffer to analog_data union
for (int i = 0; i < sizeof(analog_data); i++)
{
analog_data.u8[i] = rxBuf[i];
}
// get voltage (2.5*adc_reading/4096)
// divide by 3650 (3.65 kohm) to get current (A)
// multiply by 1000000 to get uA
// divide by 0.1428 to get Lux (based on fluorescent light Fig. 1 datasheet)
// divide by 0.5 to get Lux (based on incandescent light Fig. 1 datasheet)
// We can simplify the factors, but for demostration purpose it's OK
light_sensor = ((float)analog_data.u32*2.5/4095)*1000000 / (3650*0.1428);
Log_Debug("Received %d bytes. ", bytesReceived);
Log_Debug("\n");
}
/// <summary>
/// Handle send timer event by writing data to the real-time capable application.
/// </summary>
static void TimerEventHandler(EventData *eventData)
{
if (ConsumeTimerFdEvent(timerFd) != 0) {
terminationRequired = true;
return;
}
SendMessageToRTCore();
}
/// <summary>
/// Helper function for TimerEventHandler sends message to real-time capable application.
/// </summary>
static void SendMessageToRTCore(void)
{
static int iter = 0;
// Send "Read-ADC-%d" message to real-time capable application.
static char txMessage[32];
sprintf(txMessage, "Read-ADC-%d", iter++);
Log_Debug("Sending: %s\n", txMessage);
int bytesSent = send(sockFd, txMessage, strlen(txMessage), 0);
if (bytesSent == -1)
{
Log_Debug("ERROR: Unable to send message: %d (%s)\n", errno, strerror(errno));
terminationRequired = true;
return;
}
}
//// end ADC connection
/// <summary>
/// Set up SIGTERM termination handler, initialize peripherals, and set up event handlers.
/// </summary>
/// <returns>0 on success, or -1 on failure</returns>
static int InitPeripheralsAndHandlers(void)
{
struct sigaction action;
memset(&action, 0, sizeof(struct sigaction));
action.sa_handler = TerminationHandler;
sigaction(SIGTERM, &action, NULL);
epollFd = CreateEpollFd();
if (epollFd < 0) {
return -1;
}
//// ADC connection
// Open connection to real-time capable application.
sockFd = Application_Socket(rtAppComponentId);
if (sockFd == -1)
{
Log_Debug("ERROR: Unable to create socket: %d (%s)\n", errno, strerror(errno));
Log_Debug("Real Time Core disabled or Component Id is not correct.\n");
Log_Debug("The program will continue without showing light sensor data.\n");
// Communication with RT core error
RTCore_status = 1;
//return -1;
}
else
{
// Communication with RT core success
RTCore_status = 0;
// Set timeout, to handle case where real-time capable application does not respond.
static const struct timeval recvTimeout = { .tv_sec = 5,.tv_usec = 0 };
int result = setsockopt(sockFd, SOL_SOCKET, SO_RCVTIMEO, &recvTimeout, sizeof(recvTimeout));
if (result == -1)
{
Log_Debug("ERROR: Unable to set socket timeout: %d (%s)\n", errno, strerror(errno));
return -1;
}
// Register handler for incoming messages from real-time capable application.
if (RegisterEventHandlerToEpoll(epollFd, sockFd, &socketEventData, EPOLLIN) != 0)
{
return -1;
}
// Register one second timer to send a message to the real-time core.
static const struct timespec sendPeriod = { .tv_sec = 1,.tv_nsec = 0 };
timerFd = CreateTimerFdAndAddToEpoll(epollFd, &sendPeriod, &timerEventData, EPOLLIN);
if (timerFd < 0)
{
return -1;
}
RegisterEventHandlerToEpoll(epollFd, timerFd, &timerEventData, EPOLLIN);
}
//// end ADC Connection
if (initI2c() == -1) {
return -1;
}
// Traverse the twin Array and for each GPIO item in the list open the file descriptor
for (int i = 0; i < twinArraySize; i++) {
// Verify that this entry is a GPIO entry
if (twinArray[i].twinGPIO != NO_GPIO_ASSOCIATED_WITH_TWIN) {
*twinArray[i].twinFd = -1;
// For each item in the data structure, initialize the file descriptor and open the GPIO for output. Initilize each GPIO to its specific inactive state.
*twinArray[i].twinFd = (int)GPIO_OpenAsOutput(twinArray[i].twinGPIO, GPIO_OutputMode_PushPull, twinArray[i].active_high ? GPIO_Value_Low : GPIO_Value_High);
if (*twinArray[i].twinFd < 0) {
Log_Debug("ERROR: Could not open LED %d: %s (%d).\n", twinArray[i].twinGPIO, strerror(errno), errno);
return -1;
}
}
}
// Open button A GPIO as input
Log_Debug("Opening Starter Kit Button A as input.\n");
buttonAGpioFd = GPIO_OpenAsInput(MT3620_RDB_BUTTON_A);
if (buttonAGpioFd < 0) {
Log_Debug("ERROR: Could not open button A GPIO: %s (%d).\n", strerror(errno), errno);
return -1;
}
// Open button B GPIO as input
Log_Debug("Opening Starter Kit Button B as input.\n");
buttonBGpioFd = GPIO_OpenAsInput(MT3620_RDB_BUTTON_B);
if (buttonBGpioFd < 0) {
Log_Debug("ERROR: Could not open button B GPIO: %s (%d).\n", strerror(errno), errno);
return -1;
}
// Set up a timer to poll the buttons
struct timespec buttonPressCheckPeriod = { 0, 1000000 };
buttonPollTimerFd =
CreateTimerFdAndAddToEpoll(epollFd, &buttonPressCheckPeriod, &buttonEventData, EPOLLIN);
if (buttonPollTimerFd < 0) {
return -1;
}
// Tell the system about the callback function that gets called when we receive a device twin update message from Azure
AzureIoT_SetDeviceTwinUpdateCallback(&deviceTwinChangedHandler);
return 0;
}
/// <summary>
/// Close peripherals and handlers.
/// </summary>
static void ClosePeripheralsAndHandlers(void)
{
Log_Debug("Closing file descriptors.\n");
closeI2c();
CloseFdAndPrintError(epollFd, "Epoll");
CloseFdAndPrintError(buttonPollTimerFd, "buttonPoll");
CloseFdAndPrintError(buttonAGpioFd, "buttonA");
CloseFdAndPrintError(buttonBGpioFd, "buttonB");
// Traverse the twin Array and for each GPIO item in the list the close the file descriptor
for (int i = 0; i < twinArraySize; i++) {
// Verify that this entry has an open file descriptor
if (twinArray[i].twinGPIO != NO_GPIO_ASSOCIATED_WITH_TWIN) {
CloseFdAndPrintError(*twinArray[i].twinFd, twinArray[i].twinKey);
}
}
}
/// <summary>
/// Main entry point for this application.
/// </summary>
int main(int argc, char *argv[])
{
// Variable to help us send the version string up only once
bool networkConfigSent = false;
char ssid[128];
uint32_t frequency;
char bssid[20];
// Clear the ssid array
memset(ssid, 0, 128);
Log_Debug("Version String: %s\n", argv[1]);
Log_Debug("Avnet Starter Kit Simple Reference Application starting.\n");
if (InitPeripheralsAndHandlers() != 0) {
terminationRequired = true;
}
// Use epoll to wait for events and trigger handlers, until an error or SIGTERM happens
while (!terminationRequired) {
if (WaitForEventAndCallHandler(epollFd) != 0) {
terminationRequired = true;
}
#if (defined(IOT_CENTRAL_APPLICATION) || defined(IOT_HUB_APPLICATION))
// Setup the IoT Hub client.
// Notes:
// - it is safe to call this function even if the client has already been set up, as in
// this case it would have no effect;
// - a failure to setup the client is a fatal error.
if (!AzureIoT_SetupClient()) {
Log_Debug("ERROR: Failed to set up IoT Hub client\n");
break;
}
#endif
WifiConfig_ConnectedNetwork network;
int result = WifiConfig_GetCurrentNetwork(&network);
if (result < 0)
{
// Log_Debug("INFO: Not currently connected to a WiFi network.\n");
//// OLED
strncpy(network_data.SSID, "Not Connected", 20);
network_data.frequency_MHz = 0;
network_data.rssi = 0;
}
else
{
frequency = network.frequencyMHz;
snprintf(bssid, JSON_BUFFER_SIZE, "%02x:%02x:%02x:%02x:%02x:%02x",
network.bssid[0], network.bssid[1], network.bssid[2],
network.bssid[3], network.bssid[4], network.bssid[5]);
if ((strncmp(ssid, (char*)&network.ssid, network.ssidLength)!=0) || !networkConfigSent) {
memset(ssid, 0, 128);
strncpy(ssid, network.ssid, network.ssidLength);
Log_Debug("SSID: %s\n", ssid);
Log_Debug("Frequency: %dMHz\n", frequency);
Log_Debug("bssid: %s\n", bssid);
networkConfigSent = true;
#if (defined(IOT_CENTRAL_APPLICATION) || defined(IOT_HUB_APPLICATION))
// Note that we send up this data to Azure if it changes, but the IoT Central Properties elements only
// show the data that was currenet when the device first connected to Azure.
checkAndUpdateDeviceTwin("ssid", &ssid, TYPE_STRING, false);
checkAndUpdateDeviceTwin("freq", &frequency, TYPE_INT, false);
checkAndUpdateDeviceTwin("bssid", &bssid, TYPE_STRING, false);
#endif
}
//// OLED
memset(network_data.SSID, 0, WIFICONFIG_SSID_MAX_LENGTH);
if (network.ssidLength <= SSID_MAX_LEGTH)
{
strncpy(network_data.SSID, network.ssid, network.ssidLength);
}
else
{
strncpy(network_data.SSID, network.ssid, SSID_MAX_LEGTH);
}
network_data.frequency_MHz = network.frequencyMHz;
network_data.rssi = network.signalRssi;
}
#if (defined(IOT_CENTRAL_APPLICATION) || defined(IOT_HUB_APPLICATION))
if (iothubClientHandle != NULL && !versionStringSent) {
checkAndUpdateDeviceTwin("versionString", argv[1], TYPE_STRING, false);
versionStringSent = true;
}
// AzureIoT_DoPeriodicTasks() needs to be called frequently in order to keep active
// the flow of data with the Azure IoT Hub
AzureIoT_DoPeriodicTasks();
#endif
}
ClosePeripheralsAndHandlers();
Log_Debug("Application exiting.\n");
return 0;
}




{kind=link}
Comments