

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
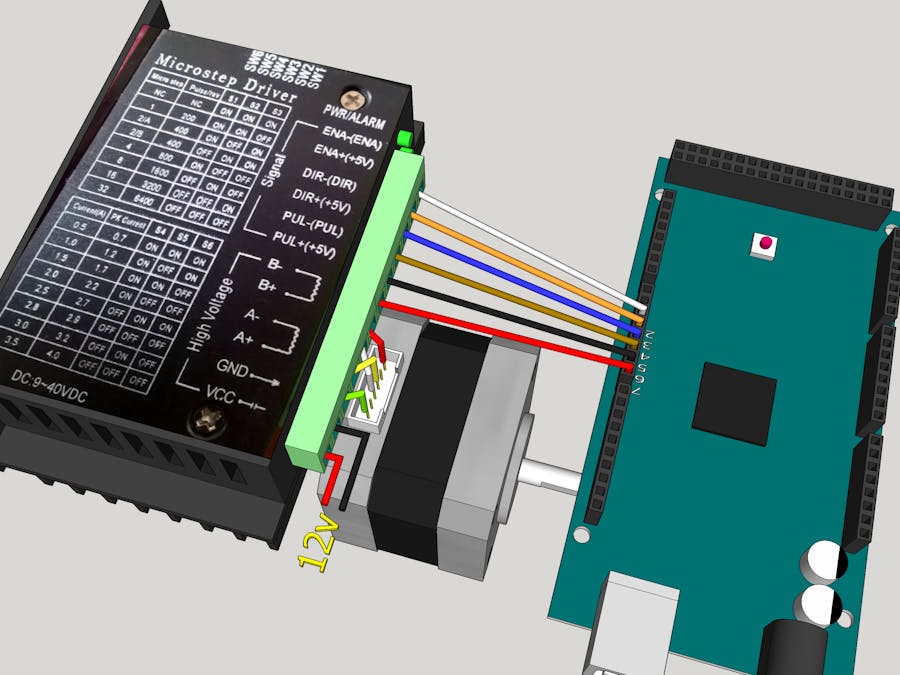
How to test a TB6600 Stepper Motor Driver Controller and stepper motor.
I made this as i am making my own CNC machines and software to control them. so needed to work out how the TB6600 worked.
To control motor type in commands in Serial Monitor, Set speed and steps follow instruction in Serial Monitor.
Will work on Arduino Mega , Uno, Nano. and different two-phase stepper motors up to 4Amps. 40volts.
Don't forget to set the switches on the side off the TB6600 when power is off. I set mine 400 Pulse per rev ON OFF ON - 0.5A ON ON ON.
Some tips to get things working
Set baud to 115200 in serial monitor
Type commands in lower case text.
.Type help to show step by step guide.
// test code for
// CNC Single Axis 4A TB6600 Stepper Motor Driver Controller
// use Serial Monitor to control 115200 baud
word X;
word NX;
int MoveSpeed=600; //step in Microseconds
String inputString = "help\n"; // a string to hold incoming data
boolean stringComplete = true; // whether the string is completet
boolean ComData = false; // whether com data is on when motors are moving will slow them down
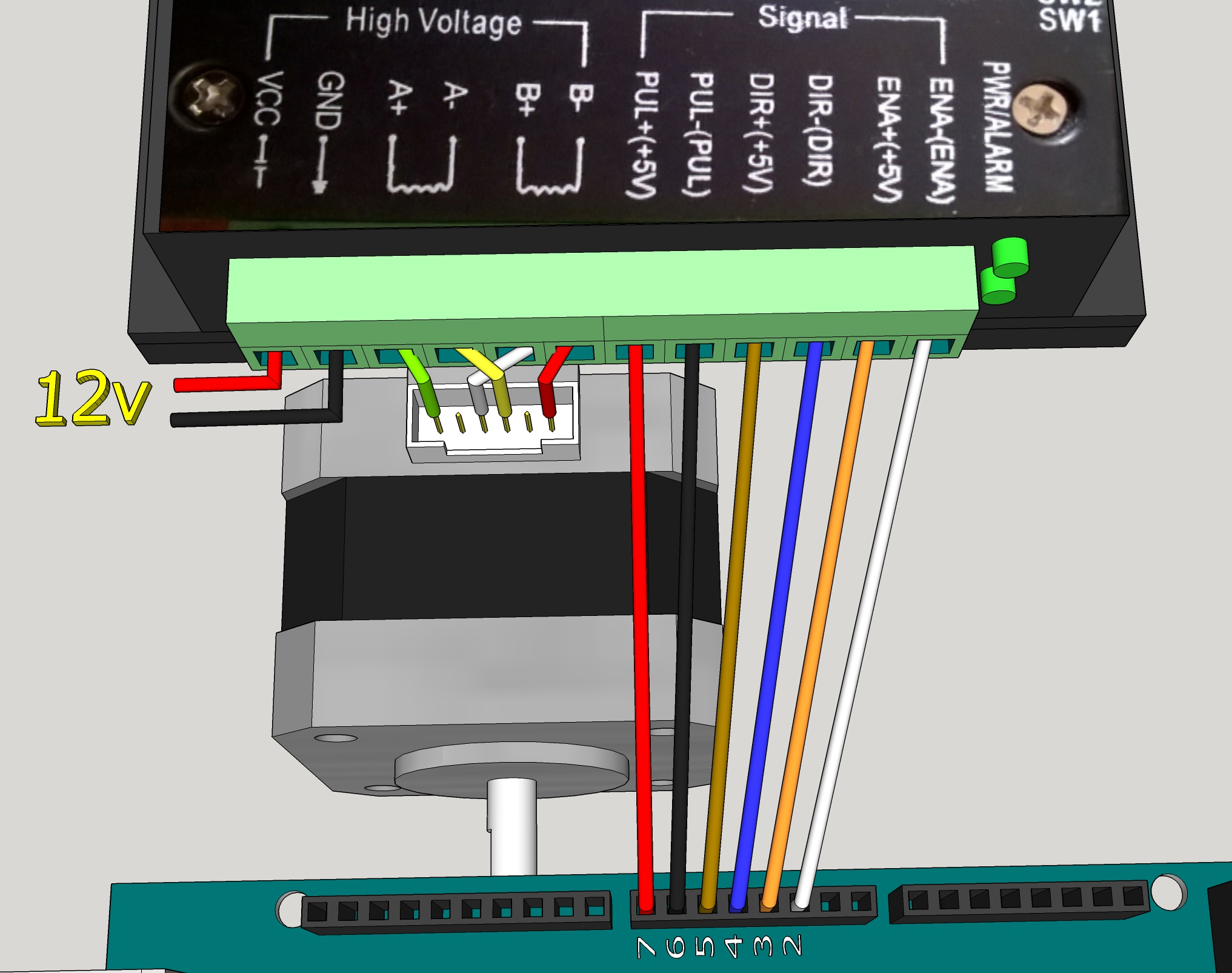
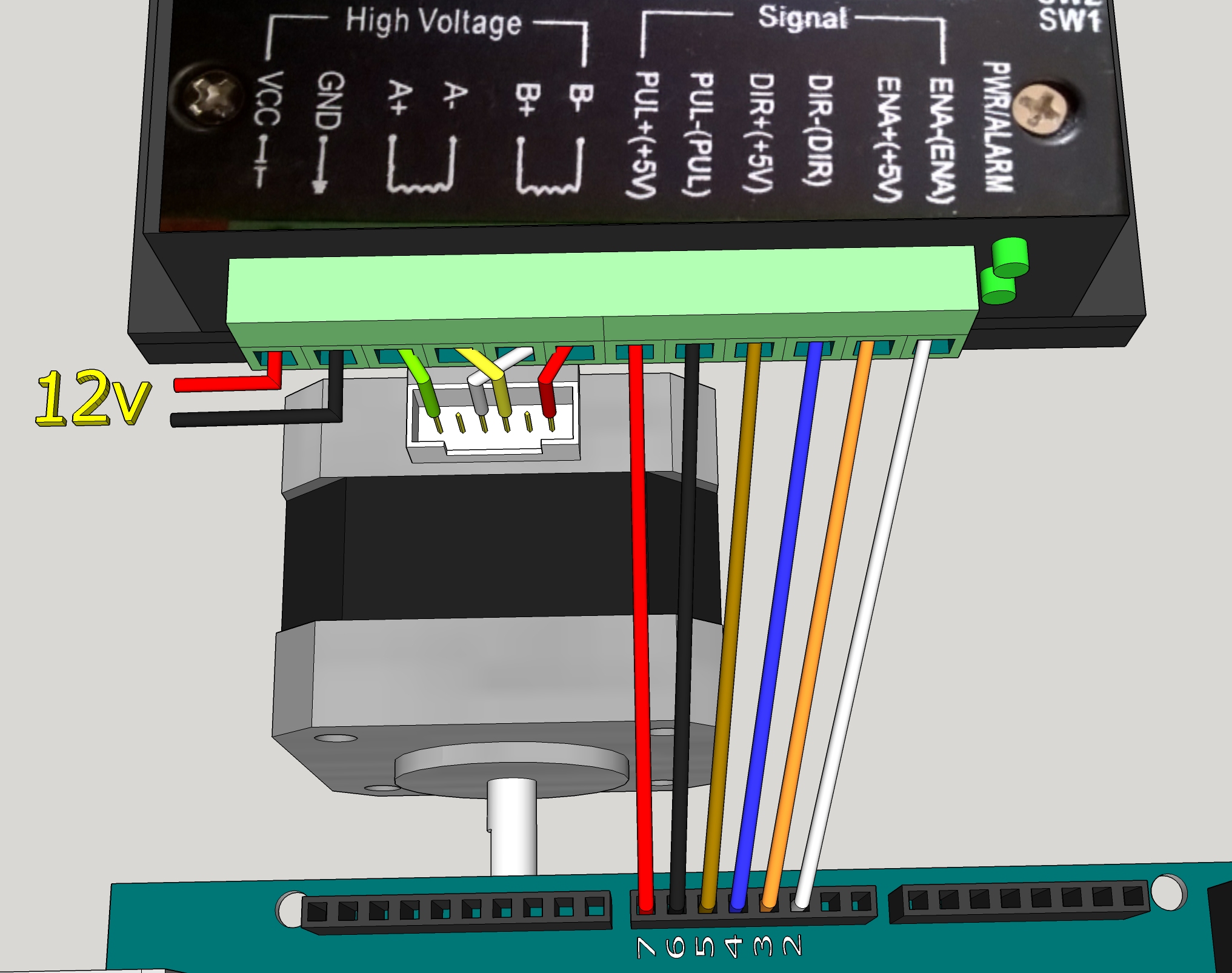
# define X_ENgnd 2 //ENA-(ENA) stepper motor enable , active low Gray
# define X_EN_5v 3 //ENA+(+5V) stepper motor enable , active low Orange
# define X_DIRgnd 4 //DIR-(DIR) axis stepper motor direction control Blue
# define X_DIR_5v 5 //DIR+(+5v) axis stepper motor direction control Brown
# define X_STPgnd 6 //PUL-(PUL) axis stepper motor step control Black
# define X_STP_5v 7 //PUL+(+5v) axis stepper motor step control RED
void setup() {// ************************************************************* setup
pinMode (X_ENgnd ,OUTPUT); //ENA-(ENA)
pinMode (X_EN_5v ,OUTPUT); //ENA+(+5V)
pinMode (X_DIRgnd,OUTPUT); //DIR-(DIR)
pinMode (X_DIR_5v,OUTPUT); //DIR+(+5v)
pinMode (X_STPgnd,OUTPUT); //PUL-(PUL)
pinMode (X_STP_5v,OUTPUT); //PUL+(+5v)
pinMode (13,OUTPUT);
digitalWrite (X_ENgnd, LOW); //ENA-(ENA)
digitalWrite (X_EN_5v, HIGH); //ENA+(+5V) low=enabled
digitalWrite (X_DIRgnd, LOW); //DIR-(DIR)
digitalWrite (X_DIR_5v, LOW); //DIR+(+5v)
digitalWrite (X_STPgnd, LOW); //PUL-(PUL)
digitalWrite (X_STP_5v, LOW); //PUL+(+5v)
Serial.begin(115200);
}
void serialEvent()// ******************************************************** Serial in
{ while (Serial.available())
{
char inChar = (char)Serial.read(); // get the new byte:
if (inChar > 0) {inputString += inChar;} // add it to the inputString:
if (inChar == '\n') { stringComplete = true;} // if the incoming character is a newline, set a flag so the main loop can do something about it:
}
}
void Help(){ // ************************************************************** Help
Serial.println("Commands step by step guide");
Serial.println("Type hello -sends TB6600 Tester Ready ");
Serial.println("Type xon -turns TB6600 on");
Serial.println("Type x+Number(0-60000) eg x1904 -to set next move steps");
Serial.println("Type mx -to make motor move to next postion");
Serial.println("Type cdon -turns on postion data when moving will increase time of step");
Serial.println("Type x0");
Serial.println("Type mx");
Serial.println("Type s+Number(0-2000) eg s500 -to set Microseconds betwean steps");
Serial.println("Type s2000");
Serial.println("Type x300");
Serial.println("Type mx");
Serial.println("Type xoff -turns TB6600 off");
Serial.println("Type cdoff -turns off postion data when moving");
inputString="";
}
void Hello(){ // ************************************************************** Hello
Serial.println("TB6600 Tester Ready");
inputString="";
}
void ENAXON(){ // ************************************************************* ENAXON
Serial.println("ENAXON");
digitalWrite (X_EN_5v, LOW);//ENA+(+5V) low=enabled
inputString="";
}
void ENAXOFF(){ // *********************************************************** ENAXOFF
Serial.println("ENAXOFF");
digitalWrite (X_EN_5v, HIGH);//ENA+(+5V) low=enabled
inputString="";
}
void MSpeed(){ // ************************************************************ MoveSpeed
inputString.setCharAt(0,' ');
MoveSpeed=inputString.toInt();
Serial.print("Speed=");
Serial.println(MoveSpeed);
inputString="";
}
void ComDataON(){ // ********************************************************* ComDataON
ComData=true;
Serial.println("ComDataOn");
inputString="";
}
void ComDataOFF(){ // ******************************************************** ComDataOFF
ComData=false;
Serial.println("ComDataOFF");
inputString="";
}
void NextX(){ // ************************************************************** NextX
inputString.setCharAt(0,' ');
NX=inputString.toInt();
Serial.print("NX=");
Serial.println(NX);
inputString="";
}
void MoveX(){ // ************************************************************** Move
int xt;
if (NX>X)
{xt=NX-X; digitalWrite (X_DIR_5v,LOW);xt=1;}
else
{xt=X-NX; digitalWrite (X_DIR_5v,HIGH);xt=-1;}
if (ComData==true)
{for (; X !=NX; X=X+xt)
{ digitalWrite (X_STP_5v, HIGH);
Serial.print("X=");
delayMicroseconds (MoveSpeed);
digitalWrite (X_STP_5v, LOW);
delayMicroseconds (MoveSpeed);
Serial.println(X+100000);
}}
else
{for (; X !=NX; X=X+xt)
{ digitalWrite (X_STP_5v, HIGH);
delayMicroseconds (MoveSpeed);
digitalWrite (X_STP_5v, LOW);
delayMicroseconds (MoveSpeed);
}}
Serial.print("X=");
Serial.println(X);
//X=NX;
inputString="";
}
void loop() // ************************************************************** loop
{
serialEvent();
if (stringComplete)
{
if (inputString=="help\n") {Help();}
if (inputString=="hello\n") {Hello();}
if (inputString=="xon\n") {ENAXON();}
if (inputString=="xoff\n") {ENAXOFF();}
if (inputString=="cdon\n") {ComDataON();}
if (inputString=="cdoff\n") {ComDataOFF();}
if (inputString=="mx\n") {MoveX();}
if (inputString.charAt(0)=='s') {MSpeed();}
if (inputString.charAt(0)=='x') {NextX();}
if (inputString !="") {Serial.println("BAD COMMAND="+inputString);}// Serial.print("\n"); }// "\t" tab
inputString = ""; stringComplete = false; // clear the string:
}
}



{kind=link}
Comments