This project is a Smart Blind Stick Simulator using STM32F446RE and FreeRTOS, designed to demonstrate a real-time obstacle detection system for assistive navigation.
The idea behind this project came from the challenges faced by visually impaired individuals while walking in unfamiliar or crowded environments. Traditional white canes only detect obstacles upon physical contact, which may not provide enough reaction time. To improve safety and responsiveness, this project simulates a smart system that can detect obstacles earlier and provide instant alerts.
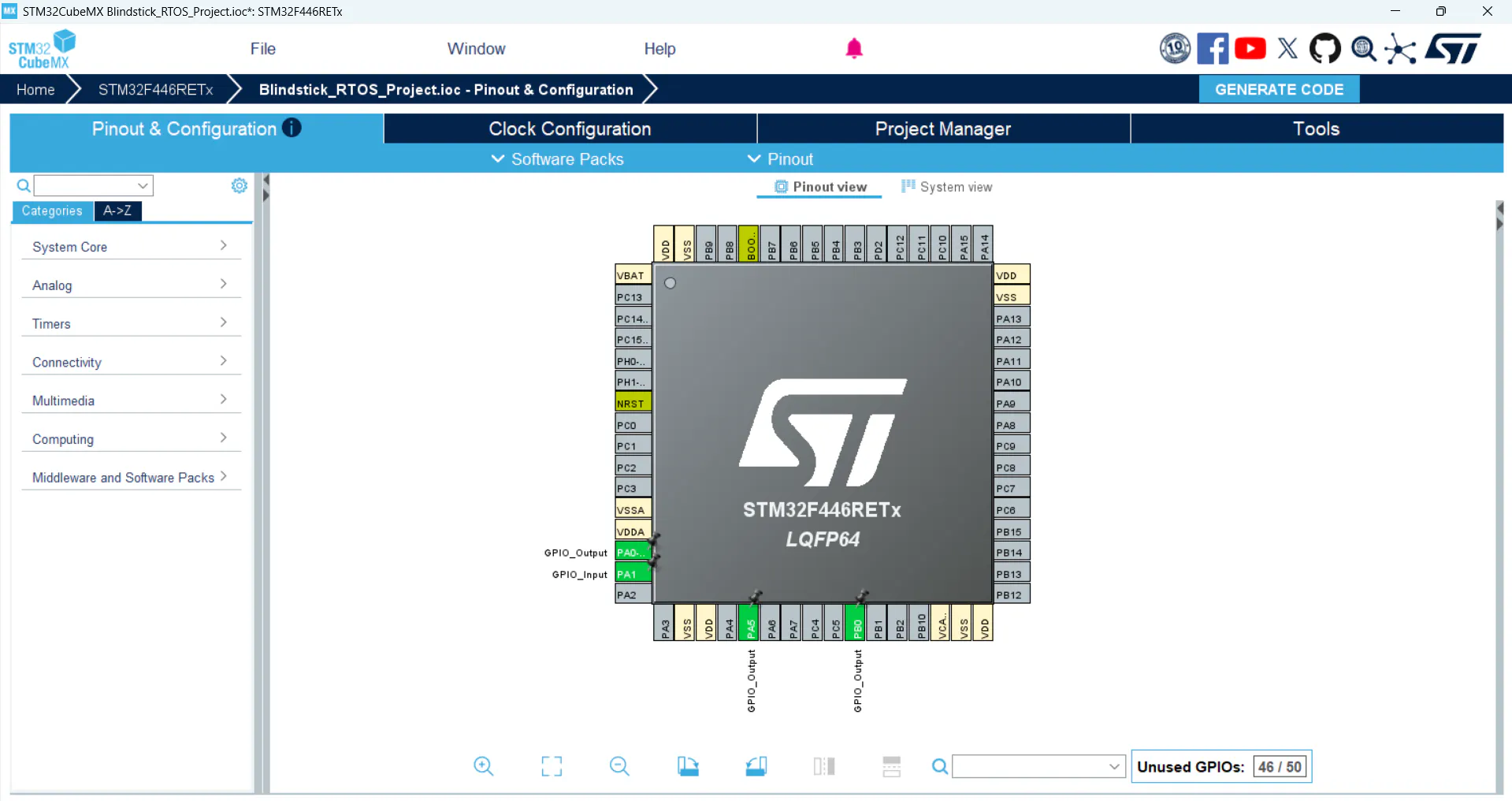
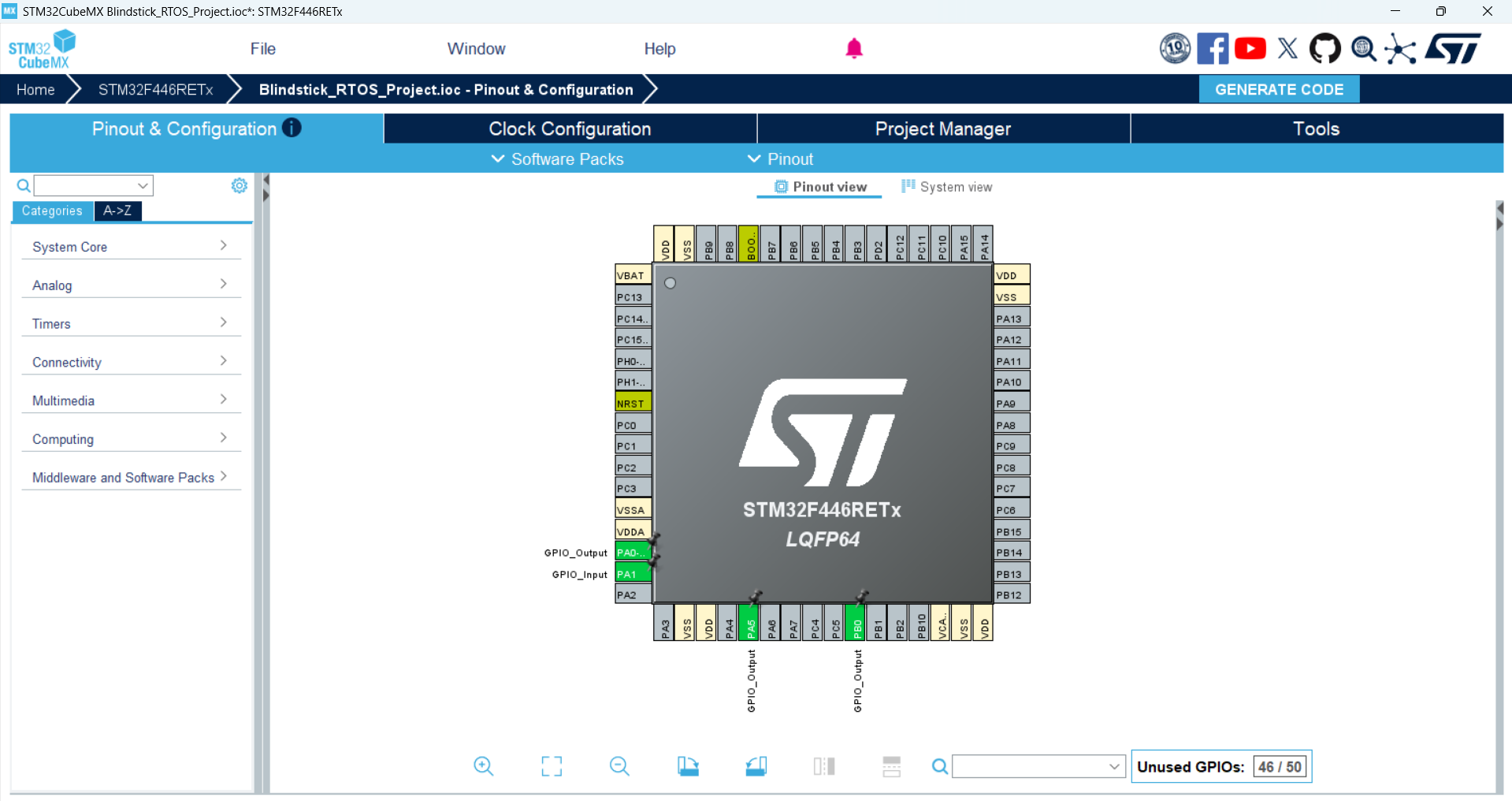
The system uses an HC-SR04 ultrasonic sensor to continuously measure the distance of nearby objects. Based on the distance, a FreeRTOS-based multitasking system processes the data and controls a buzzer and LED. As the obstacle gets closer, the alert frequency increases automatically, helping the user react faster.
The project is built using multiple RTOS tasks: one for sensing, one for processing distance data, and one for generating alerts. Communication between tasks is handled using message queues, ensuring smooth and real-time operation.
This project demonstrates how embedded systems and RTOS can be used in real-world assistive technology applications. It can further be extended with vibration feedback, voice alerts, or GPS-based navigation in the future.




















{kind=link}
Comments