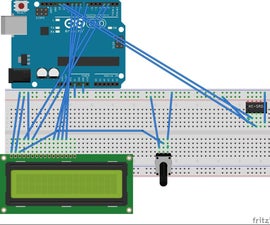
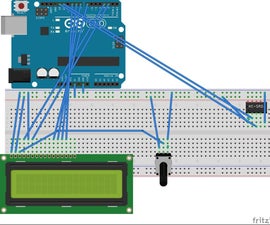
#include<LiquidCrystal.h>
LiquidCrystal lcd(2, 4, 7, 8, 9, 10);
// definiçao de constantes para pinos
#define TRIG_PIN 13
#define ECHO_PIN 12
#define RED 6
#define GREEN 5
#define BLUE 3
// definiçao de constantes para facilitar a manutençao das distancias
#define BLUE_LONG 60
#define BLUE_SHORT 30
#define GREEN_LONG 45
#define GREEN_SHORT 15
#define RED_LONG 30
#define RED_SHORT 0
void setup() {
// inicia o display LCD
lcd.begin(16,2);
// seta o modo dos pinos do LED
pinMode(RED, OUTPUT);
pinMode(GREEN, OUTPUT);
pinMode(BLUE, OUTPUT);
// seta o modo dos pinos do HC-SR05
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
// apaga o LED (anodo comum, apaga com HIGH)
digitalWrite(RED, HIGH);
digitalWrite(GREEN, HIGH);
digitalWrite(BLUE, HIGH);
}
void loop() {
// declaracao de variaveis
long duration, distance;
// le a distancia e converte para cm
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
duration = pulseIn(ECHO_PIN, HIGH);
distance = (duration/2) / 29.1;
// de acordo com a distancia, mapeia a cor do led usando pwm
// azul: de 60cm a 30cm
// verde: de 45cm a 15cm
// vermelho: de 30cm a 0cm
if (distance > RED_LONG)
digitalWrite(RED, HIGH);
else
analogWrite(RED, map(distance, RED_LONG, RED_SHORT, 255, 0));
if ((distance > GREEN_LONG) || (distance < GREEN_SHORT))
digitalWrite(GREEN, HIGH);
else
analogWrite(GREEN, map(distance, GREEN_LONG, GREEN_SHORT, 255, 0));
if ((distance > BLUE_LONG) || (distance < BLUE_SHORT))
digitalWrite(BLUE, HIGH);
else
analogWrite(BLUE, map(distance, BLUE_LONG, BLUE_SHORT, 255, 0));
// escreve a distancia no display
lcd.clear();
lcd.setCursor(0,0);
lcd.print("simaopintocorreia");
lcd.setCursor(0,1);
lcd.print("Distancia: ");
if (distance > 450)
lcd.print("> 50");
else
lcd.print(distance);
lcd.print(" cm");
// aguarda para poder ler o sensor novamente
delay(400);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}

Comments