

Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
"If you're going to eat sushi anyway, you want to eat non-rotating sushi! But you can't go to a sushi restaurant without money. Have you ever thought that way? A device has been born that lets you easily enjoy 'non-rotating sushi' at home.
Place the sushi you bought at your local convenience store on it and voilà!! It transforms into non-rotating sushi. Let's enjoy your sushi deliciously with a special feeling."
This is a charming and humorous concept - creating a device that prevents sushi from rotating to simulate the premium experience of traditional sushi restaurants using affordable convenience store sushi!
Materials- M5StickC (M5Stack)
- RoverC (M5Stack)
- Optical Tracking Odometry Sensor (SparkFun)
- Sushi (convenience store)
- Plates and trays
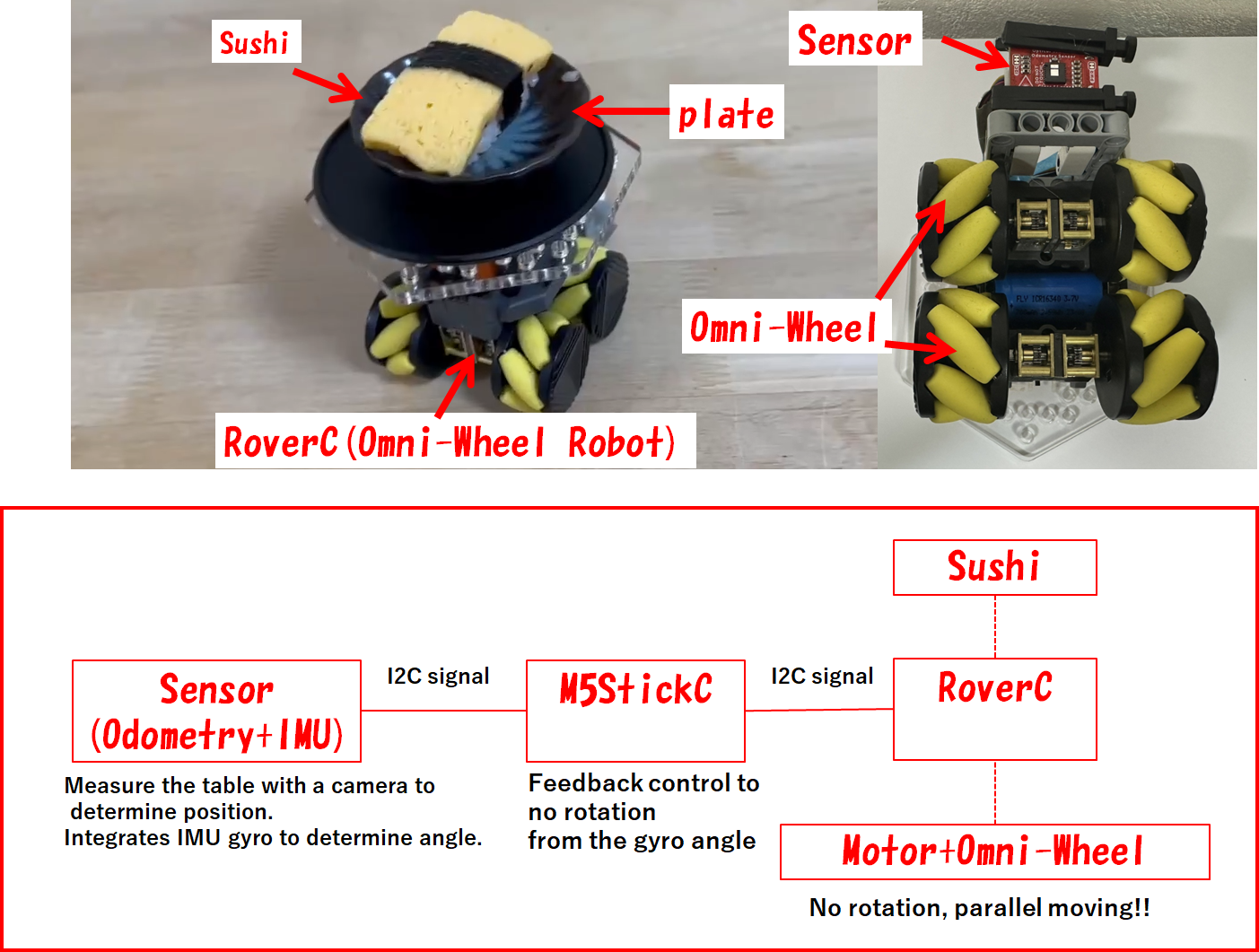
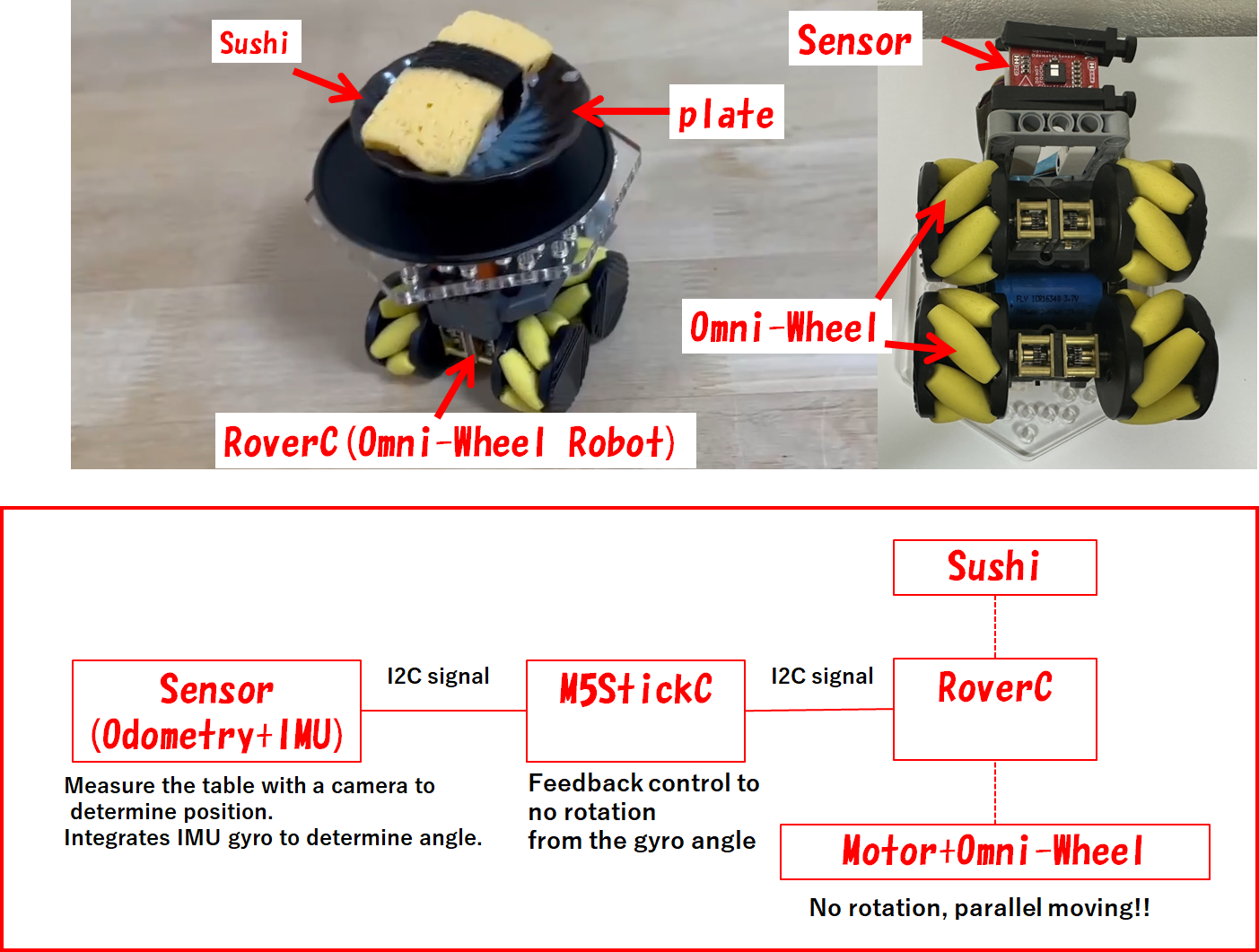
This is the control microcontroller. It reads position and angle information from the Optical Tracking Odometry Sensor in real-time, calculates the rotation direction and speed of RoverC's four motors, and sends control commands to RoverC.
- The sensor and M5StickC, and RoverC and M5StickC are each connected via I2C signals.
This is the robot that transports the sushi. It is equipped with four mecanum wheels directly connected to motors.
By controlling the rotation direction and speed of the mecanum wheels, it achieves parallel movement of the sushi while preventing the sushi from rotating.
Optical Tracking Odometry Sensor:This is a red sensor with built-in image sensor and IMU. It can detect the robot's position and angle in real-time and transmit this data to M5Stack or M5StickC via I2C communication. https://x.com/anoken2017/status/1924547621777248293 The image sensor measures movement speed from the patterns on the table surface. By integrating the movement speed, the robot's position can be determined. The IMU (Inertial Measurement Unit) gyroscope sensor measures angular velocity. By integrating the gyroscope's angular velocity, the robot's orientation angle can be determined.
Data FlowThis shows the data flow during system operation. The M5StickC controller receives position and angle data (x, y, θ) from the Optical Tracking Odometry Sensor, calculates the four motor rotation speeds based on the selected motion pattern with constraints to prevent rotation, and sends four motor command values to RoverC. This feedback control realizes real-time traveling control of non-rotating sushi.




{kind=link}
Comments