


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Overview:
It is an integration of Arduino Nano and MPU6050, a 3-axis MEMS accelerometer and gyroscope sensor which aims to provide an interactive and immersive experience of a gyroscope's behavior in a virtual 3D environment. It employs real-time motion data captured by the MPU6050 sensor, which measures angular motion along three axes: roll, pitch, and yaw. By unleashing the Arduino Nano's capabilities, the seamless connection between the physical sensor and the Processing IDE has been established. The Arduino Nano serves as a mediator, transmitting the motion data to the computer through a serial connection.
In the Processing IDE, the received motion data is processed and applied to manipulate the orientation of a virtual cube in a 3D space. The cube's movements correspond to the angular changes detected by the MPU6050 sensor. The simulation replicates the intricate behavior of a gyroscope, allowing users to interact with the virtual cube. As users manipulate the physical gyroscope, the virtual cube responds accordingly, accurately reflecting its motion in real-time.
This integration of hardware and software showcases the potential for creating dynamic and immersive simulations. By bridging the physical and virtual realms, the project provides a hands-on experience of interacting with a gyroscope-like object. The Processing IDE serves as the virtual canvas, where the received motion data is utilized to manipulate the virtual cube's orientation. Its powerful graphics capabilities enable the creation of a visually immersive experience.
The real-world applications of this method extend beyond simulation and gaming. The integration of Arduino Nano and MPU6050 can be leveraged in fields such as robotics, aerospace, and virtual reality, where precise motion tracking and control are crucial. The project encourages experimentation and innovation, allowing users to develop their own applications and expand upon the existing simulation. It provides a solid foundation for further exploration into gyroscope-based systems and their potential applications.
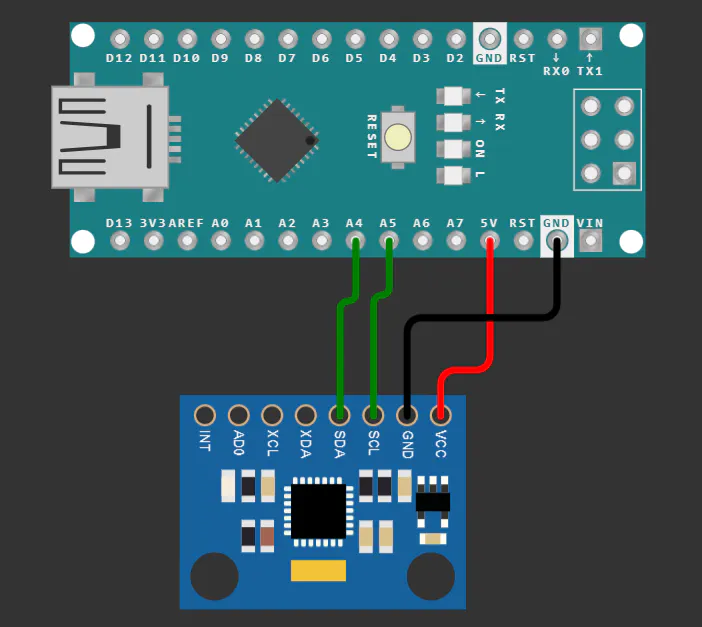
Interfacing Arduino nano & MPU6050
Make the connections as instructed below.
MPU-6050 Arduino Nano
Vcc ------------> 5v
GND ------------> GND
SCL -----------> A5
SDA -----------> A4
other pins of MPU6050 are left as it is.
Setup IDEs:
1.) Arduino IDE
Install following libraries before compiling code.
https://codeload.github.com/ElectronicCats/mpu6050/zip/refs/heads/master
https://codeload.github.com/jrowberg/i2cdevlib/zip/refs/heads/master
2.) Processing IDE
Install libraries as shown in image below.
Click on Sketch -> Import library -> Manage Libraries.
Now, download Arduino Library by "Firmata" and now it's good to go.
Note: Install both Arduino and Processing IDE. Look for the code below, there are two tabs in code section.







{kind=link}
Comments