


DISCLAIMER: There is a wrong information about the 5V to power the Hailo, the vbus current is limited. To power the Hailo connect its 5V to the pin 2 on the 40-pin header of the board.
For a more in-depth guide, we've created a detailed tutorial hosted on GitHub. In this tutorial, you'll find step-by-step instructions, code examples, and additional resources to help you better understand and implement the concepts discussed here. Whether you're a beginner or looking to deepen your knowledge, this comprehensive guide covers everything you need.
You can access the GitHub repository with the full code here: https://github.com/System-Electronics/astrial_tutorials/tree/main/05-usb_camera
IntroductionIn this guide, we will explore how to set up and control stepper motors using the Astrial board equipped with a Stepper Motor HAT. Stepper motors are precise and versatile, making them ideal for various applications such as robotics, CNC machines, and automation systems. By following this tutorial, you'll be able to connect and control stepper motors through the Astrial board, bringing your projects to life.
Hardware setup stepsLet's start by preparing the necessary hardware components:
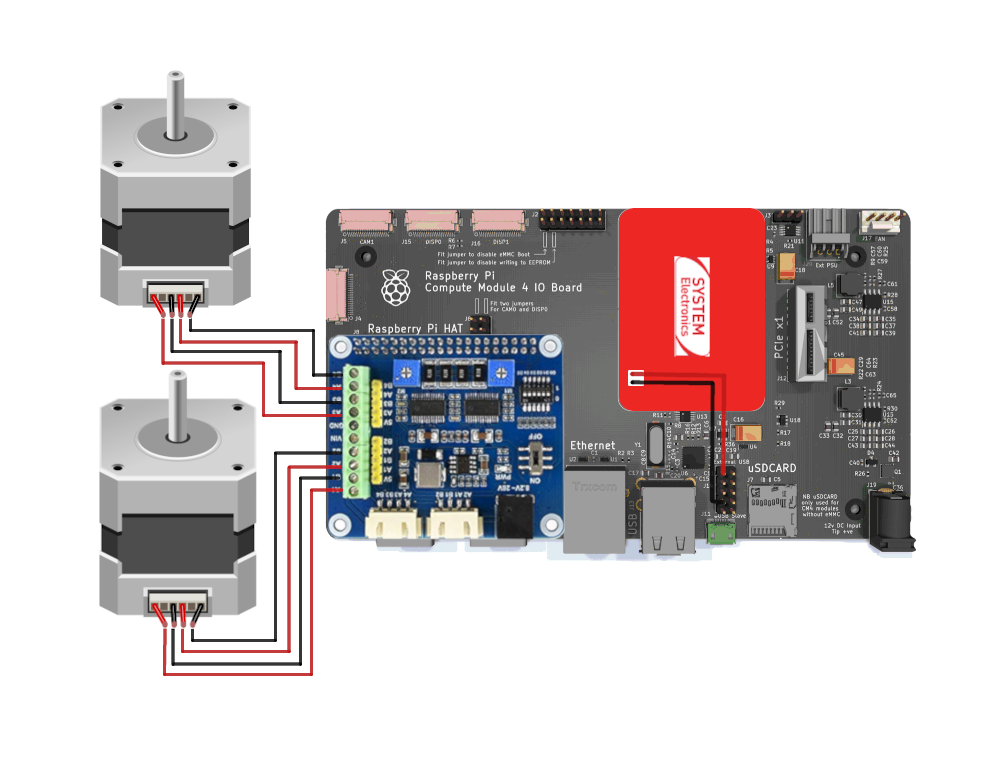
- Connect the Stepper Motor Hat to the GPIO header of your CM4 board: attach the Stepper Motor HAT to the GPIO header on the CM4 board. since the Stepper Motor Hat will occupy all the pins, you will need to power Astrial from the 5V and GND pins of the USB header, as shown in the schematic below.
- Connect the stepper motors to the correct pins on the HAT: connect the stepper motor M1 to the pins labeled A1, A2, B1, and B2, and the stepper motor M2 to the pins labeled A3, A4, B3, and B4. Also, remember to connect the power supply to the Hat, and turn it on using the switch.
With the hardware in place, let's move on to configuring the software:
- Enable all GPIOs: to use the stepper motor HAT, you need to enable all GPIOs. To do this, select the 'imx8mp-astrial-disable-all.dtb' device tree file in the U-Boot menu as shown here.
- Install Python packages: open a terminal on the Astrial board and run the following command to install the required Python package:
pip3 install gpiod==2.2.0- Create the Python script: create a Python script using the code provided in the Code section of this article.
- Copy the custom DRV8825 driver: we provide a custom version of the DRV8825 driver that works with Astrial. Download it from the GitHub repository of this tutorial and copy it into the Astrial.
- Run the python script: finally, you are ready to run the script
python3 stepper_example.pyThis script will cause the stepper motors to rotate in one direction and then reverse, demonstrating basic motor control.
If you want to learn more about Stepper Motors and how to control them, here are some useful links
{kind=link}

Comments