//This is the code for the robot
// make sure to include the NewPing and Servo Libraries before uploading else it will show error
#include <NewPing.h>
#include <Servo.h>
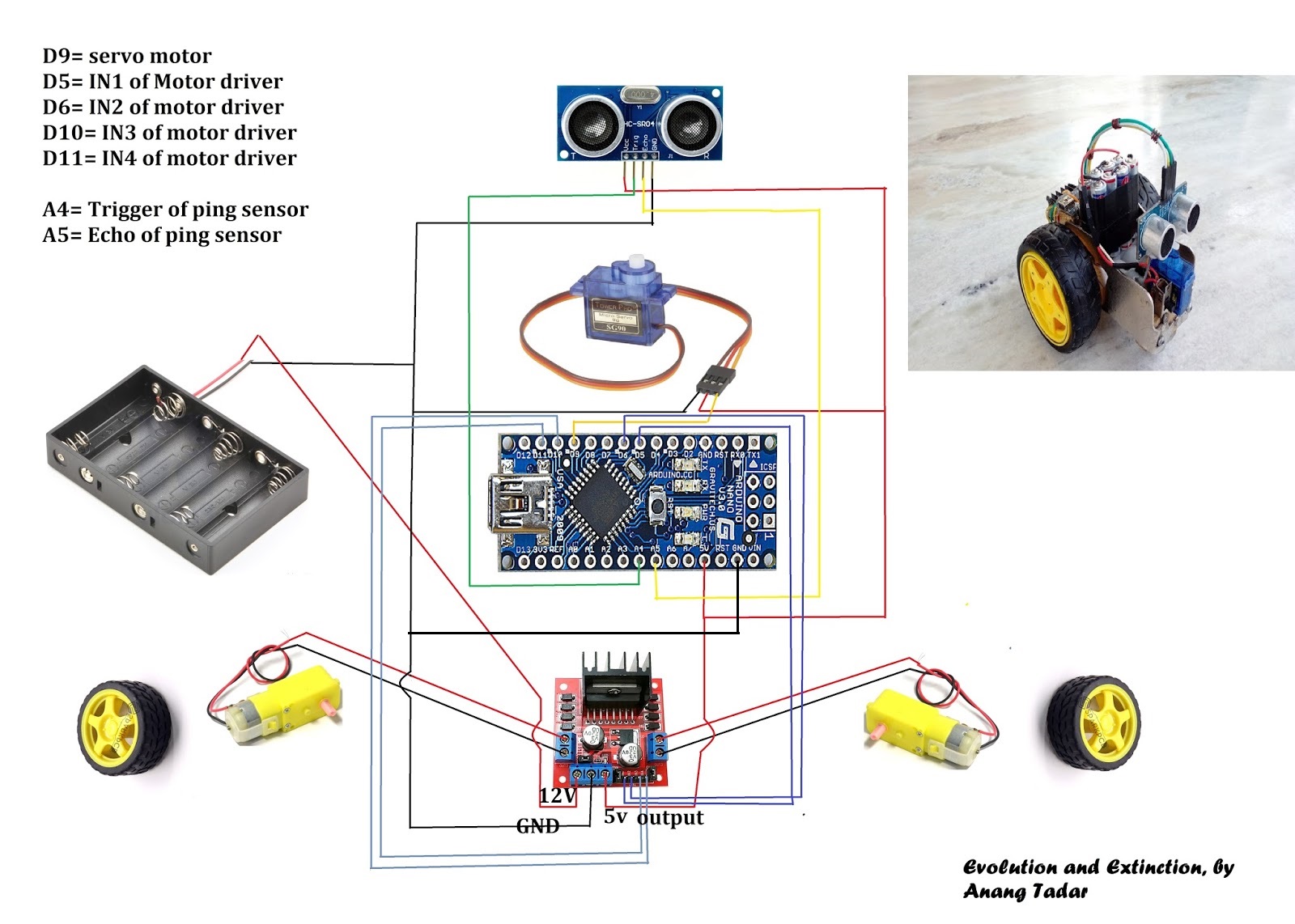
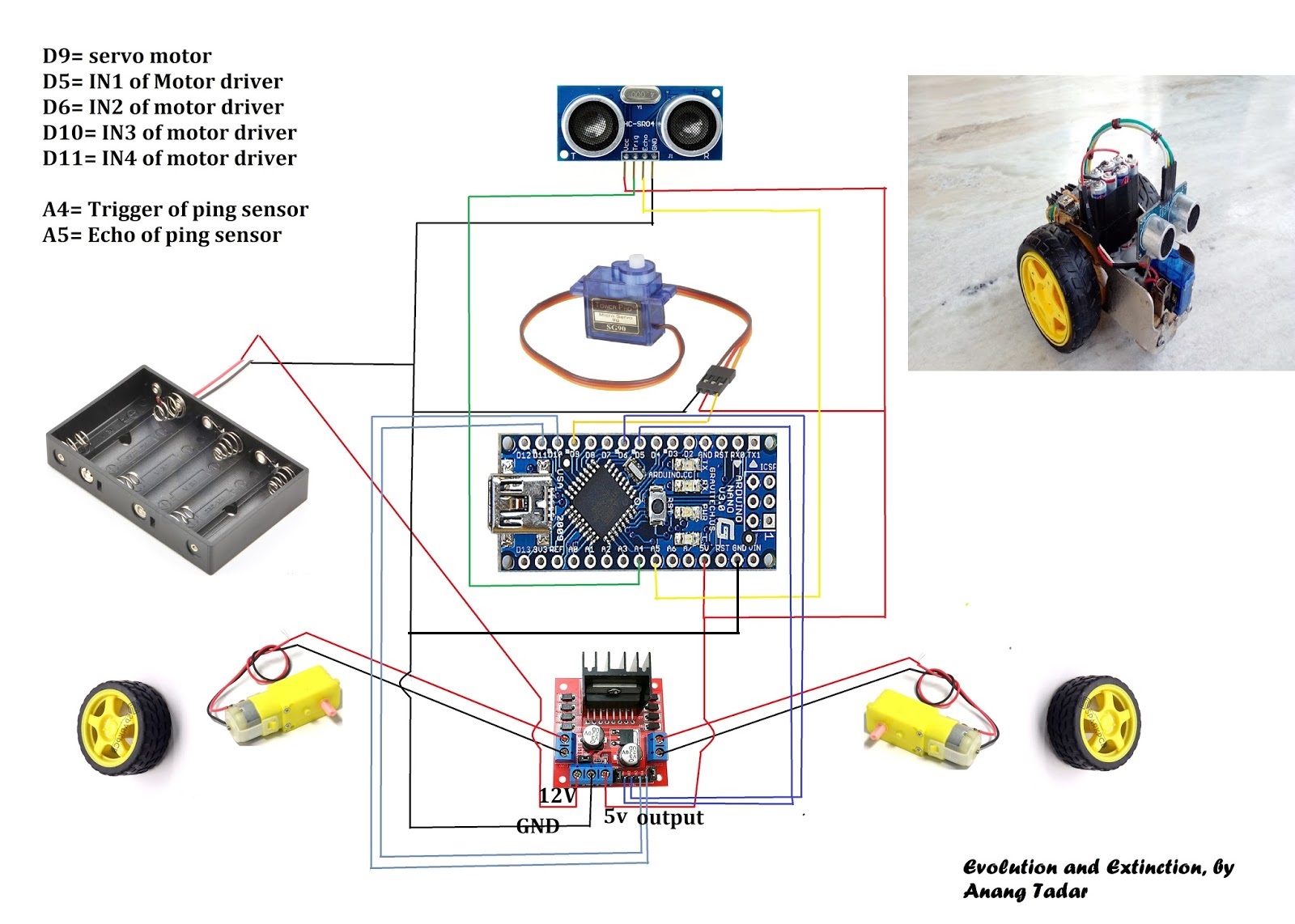
#define TRIG_PIN A4
#define ECHO_PIN A5
#define MAX_DISTANCE 200
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
Servo myservo;
boolean goesForward = false;
int distance = 100;
int speedSet = 0;
//Motor A
const int motorPin1 = 11;
const int motorPin2 = 10;
//Motor B
const int motorPin3 = 6;
const int motorPin4 = 5;
void setup()
{
myservo.attach(9);
myservo.write(115);
delay(2000);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
}
void loop()
{
int distanceR = 0;
int distanceL = 0;
delay(40);
if (distance <= 15) // Adjust the value 15 accordingly to let your robot stop at desired distance from the robot
{
moveStop();
delay(100);
moveBackward();
delay(600);
moveStop();
delay(200);
distanceR = lookRight();
delay(200);
distanceL = lookLeft();
delay(200);
if (distanceR >= distanceL)
{
turnRight();
moveStop();
} else
{
turnLeft();
moveStop();
}
}
else
{
moveForward();
}
distance = readPing();
}
int lookRight()
{
myservo.write(50);
delay(500);
int distance = readPing();
delay(100);
myservo.write(115);
return distance;
}
int lookLeft()
{
myservo.write(170);
delay(500);
int distance = readPing();
delay(100);
myservo.write(115);
return distance;
delay(100);
}
int readPing() {
delay(70);
int cm = sonar.ping_cm();
if (cm == 0)
{
cm = 250;
}
return cm;
}
void moveStop() {
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 0);
analogWrite(motorPin3, 0);
analogWrite(motorPin4, 0);
}
void moveForward() {
analogWrite(motorPin1, 255); //the value 0 - 255 here is a PWM so you can change it to increase or decrease your motor speed
analogWrite(motorPin2, 0);
analogWrite(motorPin3, 235); // this one too is the PWM for other motor
analogWrite(motorPin4, 0);
}
void moveBackward() {
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 255);
analogWrite(motorPin3, 0);
analogWrite(motorPin4, 255);
}
void turnRight() {
analogWrite(motorPin1, 255);
analogWrite(motorPin2, 0);
analogWrite(motorPin3, 0);
analogWrite(motorPin4, 255);
delay(500);
moveForward();
}
void turnLeft() {
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 255);
analogWrite(motorPin3, 255);
analogWrite(motorPin4, 0);
delay(500);
moveForward();
}
















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments