

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
I was in internship organized by Integreight and I made this as part of it.
I need your opinion and I wish I can help you by publishing this.
Step 1: Materials and ToolsCollect the following list of things.
1. MeArm Robot Arm. You can buy it from any store you prefer.
2. Arduino UNO
3. Test Board
4. Arduino USB cable
5. +5v output converter
6. 1Sheeld Board
7. 15 male-male wires
Step 2: Download 1Sheeld Mobile AppYou will need mobile Application to communicate with your hardware.
You can download it from here
Step 3: Load the Code on the ArduinoI have shared the code on codebender.cc and you can find it here
Copy and Paste the code to your Arduino IDE.
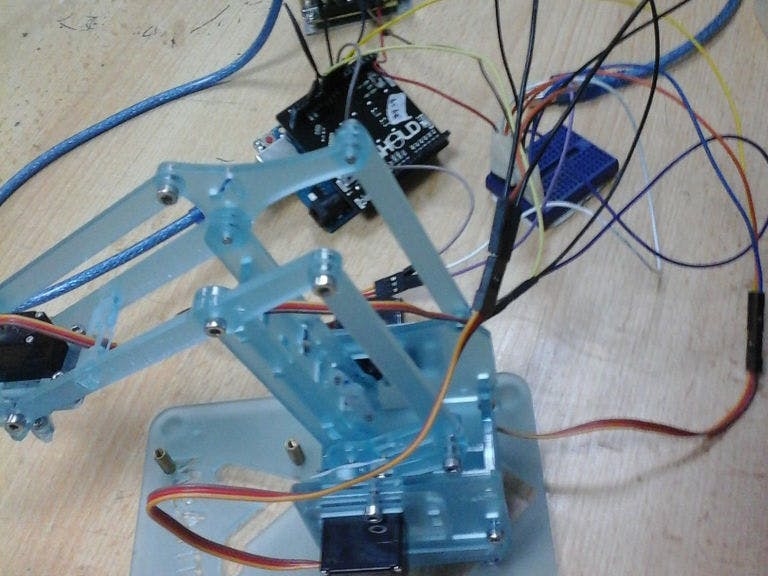
Load the code to your Arduino and then put the 1Sheeld on it as the pic shows.
Step 4: Connect the CircuitConnect all power terminals (Red wires) of the servo motor's with +5v.
Connect all ground terminals (Brown wires) of the servo motors with the ground.
Connect the ground pin on the sheeld with the ground too.
Connect the control wires from the servo motors as follow:
Base to pin 8
Shoulder (on the right) to pin 9
Elbow (on the left) to pin 10
Hand to pin 11
Step 5: Connect with the AppPress scan and you will see the available list of Sheelds.
Choose your one, and enable the GamePad as you see.
Press the shield icon on the top right of the app to see your Game Pad.
You are now connected with the Arm Robot.
Step 6: Play and let us SeeNow use the Application and play with your arm, share it with your friends and let me see if I could help you.




Comments