

Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
AMBER is unlocking a new era for intuitive control, robotic technology with affordable, lightweight and Zero-Code robotic arm. By drastically reducing the costs and technical barriers to entry, AMBER L1 is the best choice to enable beginners, experienced developers or companies to embrace robot intelligence for the future.
We have taken simple operation and easy-to-use as our goal, and we hope to lower the threshold for using the robotic arm, that's why we called Zero-Code.
With AMBER AI intuitive control, you don't even have to think about the robot. Just squeeze the controller and place it exactly where you want.
- Open-box to use
Amber Lucid-1 integrates the structural verification of motors, drives, reducers and manipulators, and does not require the background of the complicated underlying technologies. Very portable, easy to deploy anywhere.
- Dead-simple control
AI intuitive control benefits from the latest AI visual ranging and Inertial measurement technology. Using this AI visual, intuitive technology, you never have to reorient yourself, just follow your intuitive flash ideas,
- AI Intuitive controller & path planning
- The pioneering 6D stereoscopic vision+IMU technology
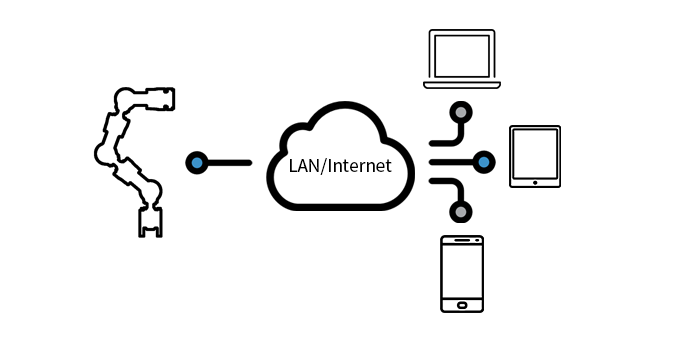
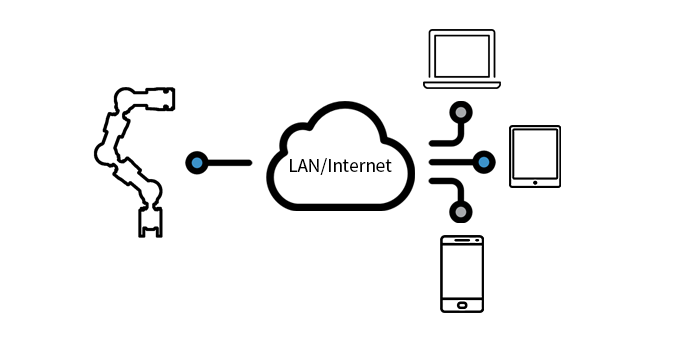
- Full compatible with ROS2, RViz and Moveit2, plenty of reference code and solution
Lucid ONE online Twitch streaming, punch to play with REAL Robot online!.








{kind=link}
Comments