




Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Cubecon was completed.
Wait here! Information on Cubecon can be found in "Makers(Cubecon) #4 First Prototype".
We added the TV power and volume control features that were not included in the previous prototype.
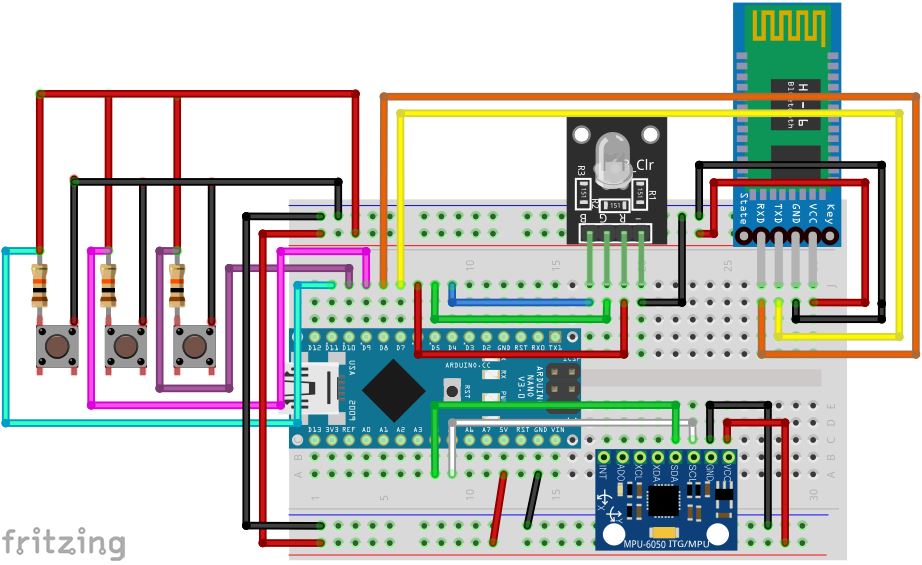
Due to the lack of Cubecon's remaining side, TV power and volume control functions could not be used as a gyro sensor. So we added the TV power and volume control function as a button instead of a gyro sensor. Nevertheless, it's easier to press because the button is bigger than the existing remote. However, the problem with the battery position is still being considered by the team members.
Inside the CubeconThe button was soldered to the resistor and connected to the breadboard.
We put the breadboard on top of the battery.
Cubecon DesignIt is the first Cubecon designed as a 3D printer.
However, this design has several drawbacks.
So it is the second designed Cubecon.
This design has a channel name on each side, and there is also a TV power and volume control buttons. Currently we are designing another Cubecon shape.
Signal converterIt is the first design of the signal converter.
There is a cover to cover the side, so the inside is not visible when used.
Inside the Signal converterThe size of the signal converter is designed to be as small as possible so that the sensor and the battery can fit perfectly.
Signal converter DesignThis design is a design that can be placed put on objects, like a photo. And we think of also another design. That design is a TV set-top box shape. This design can be used by putting it next to the TV, so anyone can use it. Also, we are thinking of more diverse designs.
{kind=link}
{kind=link}




Comments