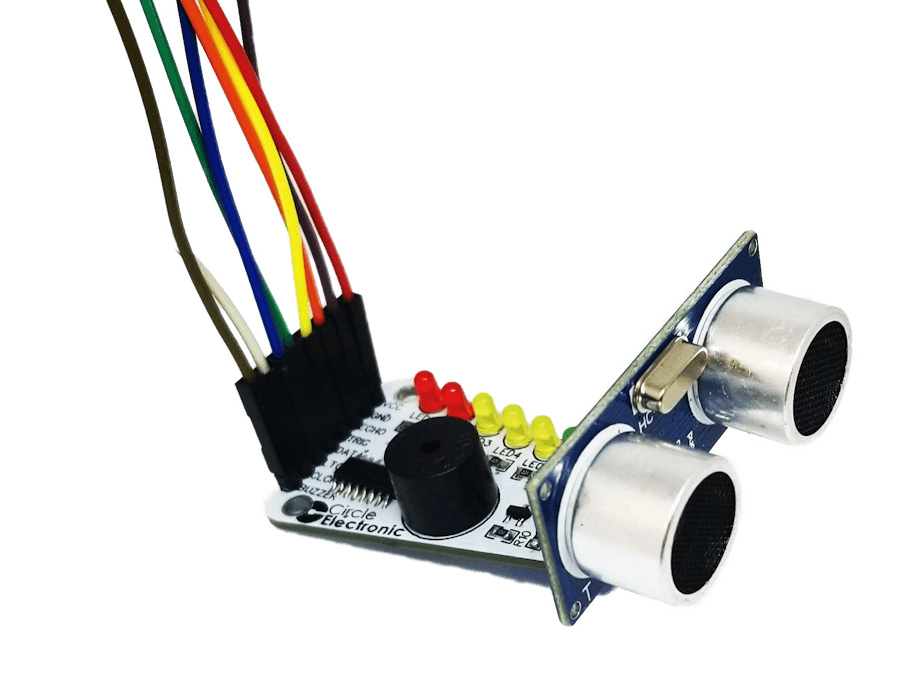
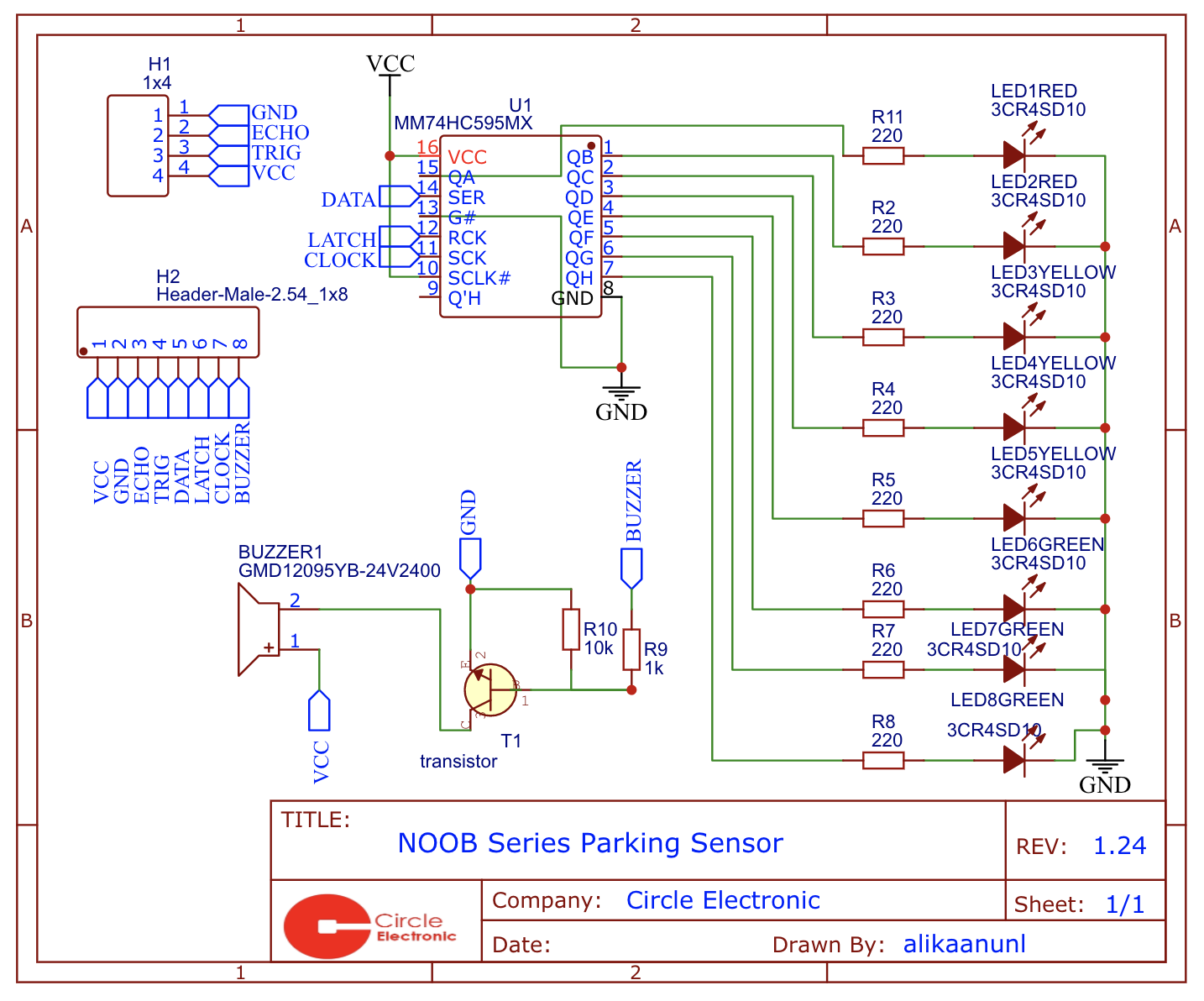
#define trigpin 12 //We need trig and echo pin for use HC-SR04 Sensor.
#define echopin 11
#define clock 10 //Clock, latch and data pins are about 74HC595 shift register
#define latch 9 // We need to use this pins for our LED's
#define data 8 //More details at: https://www.arduino.cc/en/tutorial/ShiftOut
#define buzzer 5 //We are using 1 buzzer for voice to get feedback betwwen obstacles and us
static int range; //We need this variables for use our Ultrasonic Sensor
static int Time;
byte leds[]={0b10000000,
0b11000000,
0b11100000,
0b11110000,
0b11111000,
0b11111100,
0b11111110,
0b11111111,
0b00000000 };
//We need to assign our leds for how many from them will be working in the range for between obstacles and us
void setup()
{
pinMode(trigpin, OUTPUT); //This code is about what our pins are will be output or input
pinMode(echopin, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(latch, OUTPUT);
pinMode(clock, OUTPUT);
pinMode(data, OUTPUT);
}
void loop()
{
digitalWrite(trigpin, HIGH); //This area about our sensor codes
delayMicroseconds(1000); //More details at https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/
digitalWrite(trigpin, LOW);
Time = pulseIn(echopin, HIGH);
range = (Time/2) / 29.1;
//After from here we are setting which leds and buzzer will be active at which range, you can change the ranges as you wish
if(range>=141){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[8]);
digitalWrite(latch,HIGH);
//We are setting our leds off at over 141cm range
}
if(range>=121&&range<=140){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[0]); //Which led scnerio will be work in this range
digitalWrite(latch,HIGH);
bzzr(1000); //our buzzer intensity in this range
}
if(range>=101&&range<=120){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[1]);
digitalWrite(latch,HIGH);
bzzr(700);
}
if(range>=81&&range<=100){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[2]);
digitalWrite(latch,HIGH);
bzzr(500);
}
if(range>=61&&range<=80){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[3]);
digitalWrite(latch,HIGH);
bzzr(300);
}
if(range>=41&&range<=60){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[4]);
digitalWrite(latch,HIGH);
bzzr(200);
}
if(range>=21&&range<=40){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[5]);
digitalWrite(latch,HIGH);
bzzr(100);
}
if(range>=11&&range<=20){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[6]);
digitalWrite(latch,HIGH);
bzzr(50);
}
if(range>=0&&range<=10){
digitalWrite(latch,LOW);
shiftOut(data,clock,MSBFIRST,leds[7]);
digitalWrite(latch,HIGH);
bzzr(1);
}
}
void bzzr(int speed){
digitalWrite(buzzer, LOW);
static unsigned long time=millis();
if(millis()-time >=speed){
time=millis();
digitalWrite(buzzer, HIGH);
}
} //This is buzzer function. You dont need to know this for use the parking sensor.





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments