



Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
| ||||||
What Do I Build Next? Some Assembly required! Part 6 of 4...Part 1
This is an ongoing project, each phase was due its own story. This story will actually be two parts as well.
This 1st part will be the assembly and test of the LewanSoul LeArm. I purchased this recently as a complete kit from Amazon. It is controllable via PC, Android, or IOS devices. It included proprietary software interface. It included hardware, software, wireless controller, links for manual and youtube video for instructions for everything.
I also have a Sainsmart Robotic Arm that I purchased awhile ago, but it did not include software or code examples or a controller. It also didn't include the rotary base which needed to be purchased separately. I also didn't have the proper controller or at least I didn't think I did.
The 2nd part will be to adapt/install/retrofit the LewanSoul LeArm to one of the Tanked vehicles that are part of this project build series.
I am writing this story after completing both parts as stated and taking many pictures. I also will let you know that there are multiple software packages/apps that each control a piece of this "What Do I Build Next?" Its not pretty, but it'll work for me. Maybe anyone reader can combined the controlling apps for the LeArm with the Kookye/Osoyoo Raspberry Pi Robot/MpgVideoStreamer apps.
As an Engineer, I always layout and organize included nuts, screws, etc to identify and match up for each step of assembly. I also reviewed the available youtube videos on the assembly process and then the electrical connections and finally the software configuration on the PC and then, for me, a Samsung S9 Android Phone.
The LewanSoul LeArm installation videos are available if you search on Youtube. For some strange reason the LewanSoul website was in disarray and links were not pointing to correct files. I notified them "Support@lewansoul.com" last week (May 9th or so) of possible "hacking and virus infections". There was a "QR Code" link in the kit to the information as well. I don't believe LewanSoul wants users to use their info without buying their kits...I'm not sure of that either.
Begin the assembly, baseplate for servo 5
Next step, subplate 2 servo horn for servo 6
Next step, assembly rotary bearing assembly
Gather, identify and I labelled my servos
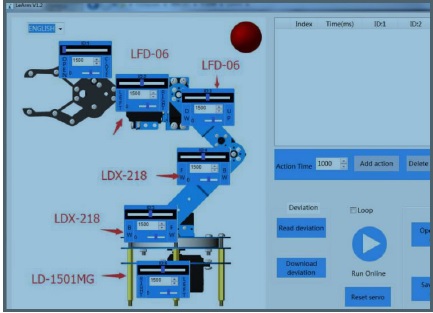
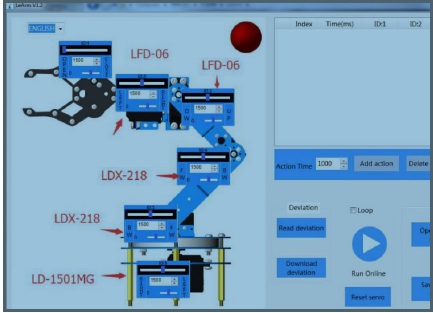
An important NOTE- each servo must be set to 1500 "mid travel" before assembly
so I connect to servo bus controller and using the PC/Laptop software setup for "homing" I tested each "non-connected"
Non-digital, servos 1, 2, 3 on left Digital, servos 4, 5, 6 on right. Pay attention to color coded pins, match colored wires to pins. Ensure metal wire tangs face inward.
1st Functional test of control module and assembled LeArm... below are other example motions
A combined video....teaser of part 7 of 4





{kind=link}
{kind=link}
Comments