


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
 |
| |||||
| ||||||
For a year, I have been buying AdaFruit's new Feather based items thinking that at some time I would build another tracked vehicle. Now I didn't want to invest again in another platform that required special software/code to make work. I also wanted a robot controlled via my cellphone or tablet (Android/Windows vs Bluetooth BLE/Wifi).
I had experience with RaspberryPi, Arduino, PcDuino, Particle, Photon based WiFi enabled vehicles programmed with Python or C++. Most of these vehicles were built upon similar code samples.
The hardest thing about building this project would be soldering the headers on each of the 6 Feather based boards.
This project was going to be based upon the option to utilize either the Feather HUZZAH with ESP8266 or the 32u4 Bluefruit boards as the controller with the Motor FeatherWing and the FeatherWing Doubler to drive the Tracked/Tank/Wheeled platform of your choice.
My choice of vehicles were many, since I had 2-wheeled, 4-wheeled, and tracked based platforms on hand. I chose a tracked tank platform from Sainsmart.
PLEASE DOWNLOAD and review appropriate Adafruit training documentation from their website for each component utilized. It is very informative and is helpful and required to setup access and control in used by each module.
Huzzah with ESP8266 webcontrol videoI have listed different battery types/holders because the Adafruit Lithium Ion batteries do not have a power ON/OFF switch, but the 4x AA or 3x AA battery holder does. Its a matter of preference.
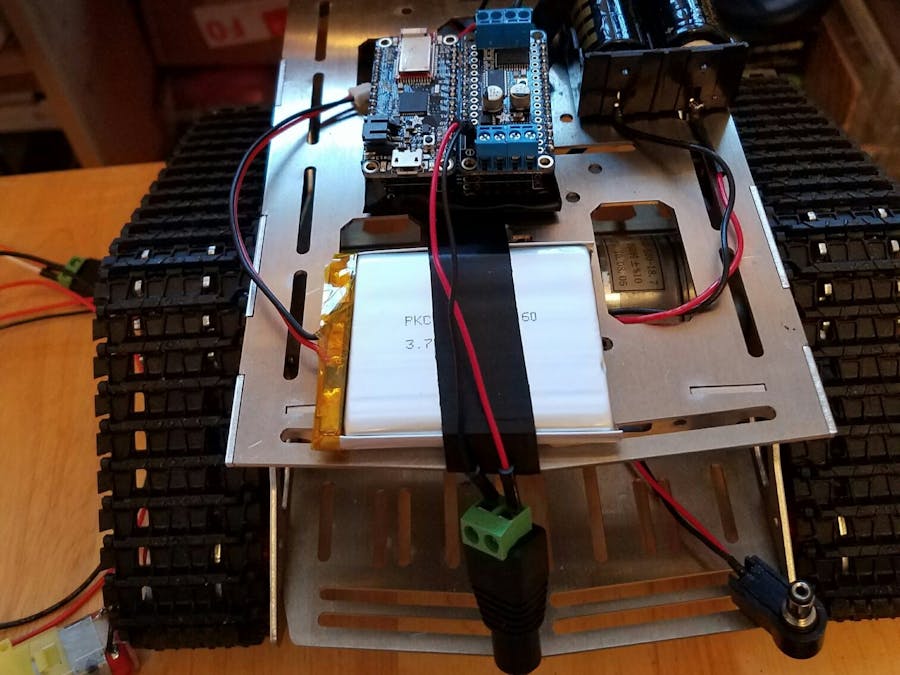
This project requires a separate battery source for the HUZZAH or Feather 32u4, the motor driver requires its own source 4.5v to 14v dc, I used 2x 18650 batteries in a holder with a 2.1mm power jack/plug.
I also used a 12vdc power pack (not listed originally from Linksprite/CuteDigi)
All assembly documentation can be downloaded from AdaFruit's website for each of the components utilized and as a basis for development of software control.
/*
aREST Library for Arduino
See the README file for more details.
Written in 2014 by Marco Schwartz.
This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License:
http://creativecommons.org/licenses/by-sa/4.0/
Version 2.4.2
Changelog:
Version 2.4.2: Added publish() support for MKR1000
Version 2.4.1: Additional fixes for Pro plans
Version 2.4.0: Added support for aREST Pro & several fixes
Version 2.3.1: Fixed pin mapping for NodeMCU/Wemos boards
Version 2.3.0: Implement required changes for the cloud server upgrade
Version 2.2.1: Added compatibility with the WINC1500 chip
Version 2.2.0: Added compatibility with the Arduino MKR1000 board
Version 2.1.2: Added data about hardware type in JSON answer
Version 2.1.1: Fixed analogWrite() for ESP8266 chips
Version 2.1.0: Added publish() function
Version 2.0.2: Able to change MQTT remote server
Version 2.0.2: Added cloud access support for the Ethernet library
Version 2.0.1: Added beta support for cloud access via cloud.arest.io
Version 2.0.0: Added beta support for MQTT communications
Version 1.9.10: Added support for floats & Strings for Uno (without the CC3000 chip)
Version 1.9.8: Added support for ESP8266 chip
Version 1.9.7: Added support for Arduino 1.6.2
Version 1.9.6: Added support for float variables for Arduino Mega
Version 1.9.5: Added compatibility with Arduino IDE 1.5.8
Version 1.9.4: Bug fixes & added support for configuring analog pints as digital outputs
Version 1.9.3: Added description of available variables for the /id and / routes
Version 1.9.2: Added compatibility with the Arduino WiFi library
Version 1.9.1: Added compatibility with CORS
Version 1.9: New speedup of the library (answers 2x faster in HTTP compared to version 1.8)
Version 1.8: Speedup of the library (answers 2.5x faster with the CC3000 WiFi chip)
Version 1.7.5: Reduced memory footprint of the library
Version 1.7.4: Added a function to read all analog & digital inputs at once
Version 1.7.3: Added LIGHTWEIGHT mode to only send limited data back
Version 1.7.2: Added possibility to assign a status pin connected to a LED
Version 1.7.1: Added possibility to change number of exposed variables & functions
Version 1.7: Added compatibility with the Arduino Due & Teensy 3.x
Version 1.6: Added compatibility with the Arduino Yun
Version 1.5: Size reduction, and added compatibility with Adafruit BLE
Version 1.4: Added authentification with API key
Version 1.3: Added support for the Ethernet shield
Version 1.2: Added support of Serial communications
Version 1.1: Added variables & functions support
Version 1.0: First working version of the library
*/
#ifndef aRest_h
#define aRest_h
// Include Arduino header
#include "Arduino.h"
// MQTT packet size
#undef MQTT_MAX_PACKET_SIZE
#define MQTT_MAX_PACKET_SIZE 512
// Using ESP8266 ?
#if defined(ESP8266)
#include "stdlib_noniso.h"
#endif
// Which board?
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) || defined(CORE_WILDFIRE) || defined(ESP8266)
#define NUMBER_ANALOG_PINS 16
#define NUMBER_DIGITAL_PINS 54
#define OUTPUT_BUFFER_SIZE 2000
#elif defined(__AVR_ATmega328P__) && !defined(ADAFRUIT_CC3000_H)
#define NUMBER_ANALOG_PINS 6
#define NUMBER_DIGITAL_PINS 14
#define OUTPUT_BUFFER_SIZE 350
#elif defined(ADAFRUIT_CC3000_H)
#define NUMBER_ANALOG_PINS 6
#define NUMBER_DIGITAL_PINS 14
#define OUTPUT_BUFFER_SIZE 275
#else
#define NUMBER_ANALOG_PINS 6
#define NUMBER_DIGITAL_PINS 14
#define OUTPUT_BUFFER_SIZE 350
#endif
// Hardware data
#if defined(ESP8266)
#define HARDWARE "esp8266"
#else
#define HARDWARE "arduino"
#endif
// Size of name & ID
#define NAME_SIZE 20
#define ID_SIZE 10
// Subscriptions
#define NUMBER_SUBSCRIPTIONS 4
// Debug mode
#ifndef DEBUG_MODE
#define DEBUG_MODE 0
#endif
// Use light answer mode
#ifndef LIGHTWEIGHT
#define LIGHTWEIGHT 0
#endif
// Default number of max. exposed variables
#ifndef NUMBER_VARIABLES
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) || defined(CORE_WILDFIRE) || defined(ESP8266) || !defined(ADAFRUIT_CC3000_H)
#define NUMBER_VARIABLES 10
#else
#define NUMBER_VARIABLES 5
#endif
#endif
// Default number of max. exposed functions
#ifndef NUMBER_FUNCTIONS
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) || defined(CORE_WILDFIRE) || defined(ESP8266)
#define NUMBER_FUNCTIONS 10
#else
#define NUMBER_FUNCTIONS 5
#endif
#endif
class aREST {
public:
aREST() {
command = 'u';
pin_selected = false;
status_led_pin = 255;
state = 'u';
}
aREST(char* rest_remote_server, int rest_port) {
command = 'u';
pin_selected = false;
status_led_pin = 255;
state = 'u';
remote_server = rest_remote_server;
port = rest_port;
}
#if defined(_ADAFRUIT_MQTT_FONA_H_)
#endif
#if defined(PubSubClient_h)
// With default server
aREST(PubSubClient& client) {
command = 'u';
pin_selected = false;
status_led_pin = 255;
state = 'u';
private_mqtt_server = false;
client.setServer(mqtt_server, 1883);
}
// With another server
aREST(PubSubClient& client, char* new_mqtt_server) {
command = 'u';
pin_selected = false;
status_led_pin = 255;
state = 'u';
private_mqtt_server = true;
setMQTTServer(new_mqtt_server);
client.setServer(new_mqtt_server, 1883);
}
// Get topic
char* get_topic() {
return out_topic;
}
// Subscribe to events
void subscribe(String device, String eventName) {
// Build topic
String topic = device + "_" + eventName + "_in";
// Subscribe
char charBuf[50];
topic.toCharArray(charBuf, 50);
subscriptions_names[subscriptions_index] = charBuf;
subscriptions_index++;
}
// Publish to cloud
template <typename T>
void publish(PubSubClient& client, String eventName, T data) {
// Get event data
if (DEBUG_MODE) {
Serial.print("Publishing event " + eventName + " with data: ");
Serial.println(data);
}
// Build message
String message = "{\"client_id\": \"" + String(id) + "\", \"event_name\": \"" + eventName + "\", \"data\": \"" + String(data) + "\"}";
if (DEBUG_MODE) {
Serial.print("Sending message via MQTT: ");
Serial.println(message);
}
// Convert
char charBuf[100];
message.toCharArray(charBuf, 100);
// Publish
client.publish(publish_topic, charBuf);
}
void setKey(char* proKey, PubSubClient& client) {
// Assign MQTT server
mqtt_server = "104.131.78.157";
client.setServer(mqtt_server, 1883);
// Set key
proKey = proKey;
// Generate MQTT random ID
String randomId;
randomId = gen_random(6);
// Assign ID
strncpy(id, randomId.c_str(), ID_SIZE);
// Build topics IDs
String inTopic = randomId + String(proKey) + String("_in");
String outTopic = randomId + String(proKey) + String("_out");
strcpy(in_topic, inTopic.c_str());
strcpy(out_topic, outTopic.c_str());
// Build client ID
String clientId = randomId + String(proKey);
strcpy(client_id, clientId.c_str());
}
#endif
// Set status LED
void set_status_led(uint8_t pin){
// Set variables
status_led_pin = pin;
// Set pin as output
pinMode(status_led_pin,OUTPUT);
}
// Glow status LED
void glow_led() {
if(status_led_pin != 255){
unsigned long i = millis();
int j = i % 4096;
if (j > 2048) { j = 4096 - j;}
analogWrite(status_led_pin,j/8);
}
}
// Send HTTP headers for Ethernet & WiFi
void send_http_headers(){
addToBuffer(F("HTTP/1.1 200 OK\r\nAccess-Control-Allow-Origin: *\r\nAccess-Control-Allow-Methods: POST, GET, PUT, OPTIONS\r\nContent-Type: application/json\r\nConnection: close\r\n\r\n"));
}
// Reset variables after a request
void reset_status() {
if (DEBUG_MODE) {
#if defined(ESP8266)
Serial.print("Memory loss before reset:");
Serial.println(freeMemory - ESP.getFreeHeap(),DEC);
freeMemory = ESP.getFreeHeap();
#endif
}
answer = "";
command = 'u';
pin_selected = false;
state = 'u';
arguments = "";
index = 0;
//memset(&buffer[0], 0, sizeof(buffer));
if (DEBUG_MODE) {
#if defined(ESP8266)
Serial.print("Memory loss after reset:");
Serial.println(freeMemory - ESP.getFreeHeap(),DEC);
freeMemory = ESP.getFreeHeap();
Serial.print("Memory free:");
Serial.println(freeMemory, DEC);
#endif
}
}
// Handle request with the Adafruit CC3000 WiFi library
#ifdef ADAFRUIT_CC3000_H
void handle(Adafruit_CC3000_ClientRef& client) {
if (client.available()) {
// Handle request
handle_proto(client,true,0);
// Answer
sendBuffer(client,32,20);
client.stop();
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(Adafruit_CC3000_ClientRef& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
// Handle request with the Arduino Yun
#elif defined(_YUN_CLIENT_H_)
void handle(YunClient& client) {
if (client.available()) {
// Handle request
handle_proto(client,false,0);
// Answer
sendBuffer(client,25,10);
client.stop();
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(YunClient& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
// Handle request with the Adafruit BLE board
#elif defined(_ADAFRUIT_BLE_UART_H_)
void handle(Adafruit_BLE_UART& serial) {
if (serial.available()) {
// Handle request
handle_proto(serial,false,0);
// Answer
sendBuffer(serial,100,1);
// Reset variables for the next command
reset_status();
}
}
// template <typename T>
// void publish(Adafruit_BLE_UART& serial, String eventName, T value) {
// // Publish request
// publish_proto(client, eventName, value);
// }
// Handle request for the Arduino Ethernet shield
#elif defined(ethernet_h)
void handle(EthernetClient& client){
if (client.available()) {
// Handle request
handle_proto(client,true,0);
// Answer
sendBuffer(client,50,0);
client.stop();
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(EthernetClient& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
// Handle request for the Cytron Clone ESP8266
#elif defined(_CYTRONWIFISERVER_H_)
void handle(ESP8266Client& client){
if (client.available()) {
// Handle request
handle_proto(client,true,0);
// Answer
sendBuffer(client,0,0);
client.stop();
// Reset variables for the next command
reset_status();
}
}
// Handle request for the ESP8266 chip
#elif defined(ESP8266)
void handle(WiFiClient& client){
if (DEBUG_MODE) {
Serial.print("Memory loss before available:");
Serial.println(freeMemory - ESP.getFreeHeap(),DEC);
freeMemory = ESP.getFreeHeap();
}
if (client.available()) {
if (DEBUG_MODE) {
Serial.print("Memory loss before handling:");
Serial.println(freeMemory - ESP.getFreeHeap(),DEC);
freeMemory = ESP.getFreeHeap();
}
// Handle request
handle_proto(client,true,0);
if (DEBUG_MODE) {
Serial.print("Memory loss after handling:");
Serial.println(freeMemory - ESP.getFreeHeap(),DEC);
freeMemory = ESP.getFreeHeap();
}
// Answer
sendBuffer(client,0,0);
client.stop();
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(WiFiClient& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
// Handle request for the Arduino MKR1000 board
#elif defined(WIFI_H)
void handle(WiFiClient& client){
if (client.available()) {
if (DEBUG_MODE) {Serial.println("Request received");}
// Handle request
handle_proto(client,true,0);
// Answer
sendBuffer(client,0,0);
client.stop();
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(WiFiClient& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
// Handle request for the Arduino WiFi shield
#elif defined(WiFi_h)
void handle(WiFiClient& client){
if (client.available()) {
if (DEBUG_MODE) {Serial.println("Request received");}
// Handle request
handle_proto(client,true,0);
// Answer
sendBuffer(client,50,1);
client.stop();
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(WiFiClient& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
#elif defined(CORE_TEENSY)
// Handle request on the Serial port
void handle(usb_serial_class& serial){
if (serial.available()) {
// Handle request
handle_proto(serial,false,1);
// Answer
sendBuffer(serial,25,1);
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(usb_serial_class& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
#elif defined(__AVR_ATmega32U4__)
// Handle request on the Serial port
void handle(Serial_& serial){
if (serial.available()) {
// Handle request
handle_proto(serial,false,1);
// Answer
sendBuffer(serial,25,1);
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(Serial_& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
#else
// Handle request on the Serial port
void handle(HardwareSerial& serial){
if (serial.available()) {
// Handle request
handle_proto(serial,false,1);
// Answer
sendBuffer(serial,25,1);
// Reset variables for the next command
reset_status();
}
}
template <typename T>
void publish(HardwareSerial& client, String eventName, T value) {
// Publish request
publish_proto(client, eventName, value);
}
#endif
void handle(char * string) {
// Process String
handle_proto(string);
// Reset variables for the next command
reset_status();
}
void handle_proto(char * string) {
// Check if there is data available to read
for (int i = 0; i < strlen(string); i++){
char c = string[i];
answer = answer + c;
// Process data
process(c);
}
// Send command
send_command(false);
}
template <typename T, typename V>
void publish_proto(T& client, String eventName, V value) {
// Format data
String data = "name=" + eventName + "&data=" + String(value);
Serial.println("POST /" + String(id) + "/events HTTP/1.1");
Serial.println("Host: " + String(remote_server) + ":" + String(port));
Serial.println(F("Content-Type: application/x-www-form-urlencoded"));
Serial.print(F("Content-Length: "));
Serial.println(data.length());
Serial.println();
Serial.print(data);
// Send request
client.println(F("POST /1/events HTTP/1.1"));
client.println("Host: " + String(remote_server) + ":" + String(port));
client.println(F("Content-Type: application/x-www-form-urlencoded"));
client.print(F("Content-Length: "));
client.println(data.length());
client.println();
client.print(data);
}
template <typename T>
void handle_proto(T& serial, bool headers, uint8_t read_delay)
{
// Check if there is data available to read
while (serial.available()) {
// Get the server answer
char c = serial.read();
delay(read_delay);
answer = answer + c;
//if (DEBUG_MODE) {Serial.print(c);}
// Process data
process(c);
}
// Send command
send_command(headers);
}
#if defined(PubSubClient_h)
// Process callback
void handle_callback(PubSubClient& client, char* topic, byte* payload, unsigned int length) {
// Process received message
int i;
char mqtt_msg[100];
for(i = 0; i < length; i++) {
mqtt_msg[i] = payload[i];
}
mqtt_msg[i] = '\0';
String msgString = String(mqtt_msg);
if (DEBUG_MODE) {
Serial.print("Received message via MQTT: ");
Serial.println(msgString);
}
// Process aREST commands
String modified_message = String(msgString) + " /";
char char_message[100];
modified_message.toCharArray(char_message, 100);
// Handle command with aREST
handle(char_message);
// Read answer
char * answer = getBuffer();
// Send response
if (DEBUG_MODE) {
Serial.print("Sending message via MQTT: ");
Serial.println(answer);
Serial.print("Size of MQTT message: ");
Serial.println(strlen(answer));
Serial.print("Size of client ID: ");
Serial.println(strlen(client_id));
}
int max_message_size = 128 - 20 - strlen(client_id);
if (strlen(answer) < max_message_size) {
client.publish(out_topic, answer);
}
else {
// Max iteration
uint8_t max_iteration = (int)(strlen(answer)/max_message_size) + 1;
// Send data
for (uint8_t i = 0; i < max_iteration; i++) {
char intermediate_buffer[max_message_size+1];
memcpy(intermediate_buffer, buffer + i*max_message_size, max_message_size);
intermediate_buffer[max_message_size] = '\0';
if (DEBUG_MODE) {
Serial.print("Intermediate buffer: ");
Serial.println(intermediate_buffer);
Serial.print("Intermediate buffer size: ");
Serial.println(strlen(intermediate_buffer));
}
client.publish(out_topic, intermediate_buffer);
}
}
// Send message
// client.publish(out_topic, answer);
// Reset buffer
resetBuffer();
}
// Handle request on the Serial port
void loop(PubSubClient& client){
// Connect to cloud
if (!client.connected()) {
reconnect(client);
}
client.loop();
}
void handle(PubSubClient& client){
// Connect to cloud
if (!client.connected()) {
reconnect(client);
}
client.loop();
}
void reconnect(PubSubClient& client) {
// Loop until we're reconnected
while (!client.connected()) {
Serial.print(F("Attempting MQTT connection..."));
// Attempt to connect
if (client.connect(client_id)) {
if (private_mqtt_server) {
Serial.println(F("Connected to MQTT server"));
}
else {
Serial.println(F("Connected to aREST.io"));
}
client.subscribe(in_topic);
// Subscribe to all
// if (subscriptions_index > 0) {
//
// for (int i = 0; i < subscriptions_index; i++) {
// if (DEBUG_MODE) {
// Serial.print(F("Subscribing to additional topic: "));
// Serial.println(subscriptions_names[i]);
// }
//
// client.subscribe(subscriptions_names[i]);
// }
//
// }
} else {
Serial.print(F("failed, rc="));
Serial.print(client.state());
Serial.println(F(" try again in 5 seconds"));
// Wait 5 seconds before retrying
delay(5000);
}
}
}
#endif
void process(char c){
// Check if we are receveing useful data and process it
if ((c == '/' || c == '\r') && state == 'u') {
if (DEBUG_MODE) {
// #if defined(ESP8266)
// Serial.print("Memory loss:");
// Serial.println(freeMemory - ESP.getFreeHeap(),DEC);
// freeMemory = ESP.getFreeHeap();
// #endif
Serial.println(answer);
}
// If the command is mode, and the pin is already selected
if (command == 'm' && pin_selected && state == 'u') {
// Get state
state = answer[0];
}
// If a digital command has been received, process the data accordingly
if (command == 'd' && pin_selected && state == 'u') {
// If it's a read command, read from the pin and send data back
if (answer[0] == 'r') {state = 'r';}
// If not, get value we want to apply to the pin
else {value = answer.toInt(); state = 'w';}
}
// If analog command has been selected, process the data accordingly
if (command == 'a' && pin_selected && state == 'u') {
// If it's a read, read from the correct pin
if (answer[0] == 'r') {state = 'r';}
// Else, write analog value
else {value = answer.toInt(); state = 'w';}
}
// If the command is already selected, get the pin
if (command != 'u' && pin_selected == false) {
// Get pin
if (answer[0] == 'A') {
pin = 14 + answer[1] - '0';
}
else {
pin = answer.toInt();
}
// Save pin for message
message_pin = pin;
// For ESP8266-12 boards (NODEMCU)
#if defined(ARDUINO_ESP8266_NODEMCU) || defined(ARDUINO_ESP8266_WEMOS_D1MINI)
pin = esp_12_pin_map(pin);
#endif
if (DEBUG_MODE) {
Serial.print("Selected pin: ");
Serial.println(pin);
}
// Mark pin as selected
pin_selected = true;
// Nothing more ?
if ((answer[1] != '/' && answer[2] != '/')
|| (answer[1] == ' ' && answer[2] == '/')
|| (answer[2] == ' ' && answer[3] == '/')) {
// Nothing more & digital ?
if (command == 'd') {
// Read all digital ?
if (answer[0] == 'a') {state = 'a';}
// Save state & end there
else {state = 'r';}
}
// Nothing more & analog ?
if (command == 'a') {
// Read all analog ?
if (answer[0] == 'a') {state = 'a';}
// Save state & end there
else {state = 'r';}
}
}
}
// Digital command received ?
if (answer.startsWith("digital")) {command = 'd';}
// Mode command received ?
if (answer.startsWith("mode")) {command = 'm';}
// Analog command received ?
if (answer.startsWith("analog")) {
command = 'a';
#if defined(ESP8266)
analogWriteRange(255);
#endif
}
// Variable or function request received ?
if (command == 'u') {
// Check if variable name is in int array
for (uint8_t i = 0; i < variables_index; i++){
if(answer.startsWith(int_variables_names[i])) {
// End here
pin_selected = true;
state = 'x';
// Set state
command = 'v';
value = i;
}
}
// Check if variable name is in float array (Mega & ESP8266 only)
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) || defined(ESP8266) || defined(CORE_WILDFIRE) || !defined(ADAFRUIT_CC3000_H)
for (uint8_t i = 0; i < float_variables_index; i++){
if(answer.startsWith(float_variables_names[i])) {
// End here
pin_selected = true;
state = 'x';
// Set state
command = 'l';
value = i;
}
}
#endif
// Check if variable name is in float array (Mega & ESP8266 only)
#if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) || defined(ESP8266) || defined(CORE_WILDFIRE) || !defined(ADAFRUIT_CC3000_H)
for (uint8_t i = 0; i < string_variables_index; i++){
if(answer.startsWith(string_variables_names[i])) {
...
This file has been truncated, please download it to see its full contents.
<!DOCTYPE html>
<html>
<head>
<meta charset=utf-8 />
<title>aREST.js Demo</title>
<link rel="stylesheet" type="text/css" href="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.4/css/bootstrap.min.css">
<link rel="stylesheet" type="text/css" href="style.css">
<script type="text/javascript" src="https://code.jquery.com/jquery-2.1.4.min.js"></script>
<script type="text/javascript" src="https://cdn.rawgit.com/Foliotek/AjaxQ/master/ajaxq.js"></script>
<script type="text/javascript" src="https://cdn.rawgit.com/marcoschwartz/aREST.js/master/aREST.js"></script>
<script type="text/javascript" src="script.js"></script>
</head>
<body>
<div class='container'>
<h1>Robot</h1>
<div class='row'>
<div class="col-md-3">
Device IP address:192.168.1.248
</div>
<div class="col-md-3">
<input id='device_address' type="text" name="fname">
</div>
<div class="col-md-2">
<button id='validate' class='btn btn-primary btn-block' type="button">Validate</button>
</div>
</div>
<div class='row'>
<div class="col-md-5"></div>
<div class="col-md-2">
<button id='forward' class='btn btn-primary btn-block' type="button">Forward</button>
</div>
<div class="col-md-5"></div>
</div>
<div class='row'>
<div class="col-md-4"></div>
<div class="col-md-2">
<button id='left' class='btn btn-primary btn-block' type="button">Left</button>
</div>
<div class="col-md-2">
<button id='right' class='btn btn-primary btn-block' type="button">Right</button>
</div>
<div class="col-md-4"></div>
</div>
<div class='row'>
<div class="col-md-5"></div>
<div class="col-md-2">
<button id='backward' class='btn btn-primary btn-block' type="button">Backward</button>
</div>
<div class="col-md-5"></div>
</div>
</div>
</body>
</html>
My Feather ESP8266Wifi Arduino code
Arduino// Import required libraries
#include "ESP8266WiFi.h"
#include <aREST.h>
#include <Wire.h>
#include <Adafruit_MotorShield.h>
// Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// And connect 2 DC motors to port M3 & M4 !
Adafruit_DCMotor *L_MOTOR = AFMS.getMotor(4);
Adafruit_DCMotor *R_MOTOR = AFMS.getMotor(3);
// Create aREST instance
aREST rest = aREST();
// WiFi parameters
const char* ssid = "wifi-name";
const char* password = "wifi-pass";
// The port to listen for incoming TCP connections
#define LISTEN_PORT 80
// Create an instance of the server
WiFiServer server(LISTEN_PORT);
// Function
int stop(String message);
int forward(String message);
int right(String message);
int left(String message);
int backward(String message);
void setup(void)
{
// Start Serial
Serial.begin(115200);
// Init motor shield
AFMS.begin();
// Functions
rest.function("stop", stop);
rest.function("forward", forward);
rest.function("left", left);
rest.function("right", right);
rest.function("backward", backward);
// Give name and ID to device
rest.set_id("1");
rest.set_name("robot");
// Connect to WiFi
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
// Start the server
server.begin();
Serial.println("Server started");
// Print the IP address
Serial.println(WiFi.localIP());
}
void loop() {
// Handle REST calls
WiFiClient client = server.available();
if (!client) {
return;
}
while(!client.available()){
delay(1);
}
rest.handle(client);
}
int stop(String command) {
// Stop
L_MOTOR->setSpeed(0);
L_MOTOR->run( RELEASE );
R_MOTOR->setSpeed(0);
R_MOTOR->run( RELEASE );
}
int forward(String command) {
// Stop
L_MOTOR->setSpeed(200);
L_MOTOR->run( FORWARD );
R_MOTOR->setSpeed(200);
R_MOTOR->run( FORWARD );
}
int left(String command) {
// Stop
L_MOTOR->setSpeed(100);
L_MOTOR->run( BACKWARD );
R_MOTOR->setSpeed(100);
R_MOTOR->run( FORWARD );
}
int right(String command) {
// Stop
L_MOTOR->setSpeed(100);
L_MOTOR->run( FORWARD );
R_MOTOR->setSpeed(100);
R_MOTOR->run( BACKWARD );
}
int backward(String command) {
// Stop
L_MOTOR->setSpeed(150);
L_MOTOR->run( BACKWARD );
R_MOTOR->setSpeed(150);
R_MOTOR->run( BACKWARD );
}
My Revised Feather 32u4 BLE Arduino code
Arduino/*********************************************************************
This is an example for our nRF51822 based Bluefruit LE modules
Modified to drive a 3-wheeled BLE Robot Rover! by http://james.devi.to
Pick one up today in the Adafruit shop!
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
MIT license, check LICENSE for more information
All text above, and the splash screen below must be included in
any redistribution
*********************************************************************/
#include <string.h>
#include <Arduino.h>
#include <SPI.h>
#if not defined (_VARIANT_ARDUINO_DUE_X_)
#include <SoftwareSerial.h>
#endif
#include "Adafruit_BLE.h"
#include "Adafruit_BluefruitLE_SPI.h"
#include "Adafruit_BluefruitLE_UART.h"
#include "BluefruitConfig.h"
#include <Wire.h>
#include <Adafruit_MotorShield.h>
// #include "utility/Adafruit_PWMServoDriver.h"
// #include <Servo.h>
// Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// And connect 2 DC motors to port M3 & M4 !
Adafruit_DCMotor *L_MOTOR = AFMS.getMotor(4);
Adafruit_DCMotor *R_MOTOR = AFMS.getMotor(3);
//not used, testing acceleration
// int accelTime = 200;
//Name your RC here
String BROADCAST_NAME = "adafruit red robot rover";
String BROADCAST_CMD = String("AT+GAPDEVNAME=" + BROADCAST_NAME);
Adafruit_BluefruitLE_SPI ble(BLUEFRUIT_SPI_CS, BLUEFRUIT_SPI_IRQ, BLUEFRUIT_SPI_RST);
// A small helper
void error(const __FlashStringHelper*err) {
Serial.println(err);
while (1);
}
// function prototypes over in packetparser.cpp
uint8_t readPacket(Adafruit_BLE *ble, uint16_t timeout);
float parsefloat(uint8_t *buffer);
void printHex(const uint8_t * data, const uint32_t numBytes);
// the packet buffer
extern uint8_t packetbuffer[];
char buf[60];
/**************************************************************************/
/*!
@brief Sets up the HW an the BLE module (this function is called
automatically on startup)
*/
/**************************************************************************/
void setup(void)
{
Serial.begin(9600);
AFMS.begin(); // create with the default frequency 1.6KHz
// turn on motors
L_MOTOR->setSpeed(0);
L_MOTOR->run(RELEASE);
R_MOTOR->setSpeed(0);
R_MOTOR->run(RELEASE);
Serial.begin(115200);
Serial.println(F("Adafruit Bluefruit Robot Controller Example"));
Serial.println(F("-----------------------------------------"));
/* Initialize the module */
BLEsetup();
}
int velocity = 0;
float x, y;
int L_restrict = 0;
int R_restrict = 0;
unsigned long lastAccelPacket = 0;
bool modeToggle = false;
void loop(void)
{
// read new packet data
uint8_t len = readPacket(&ble, BLE_READPACKET_TIMEOUT);
// if (len == 0) return;
// Read from Accelerometer input
if( accelMode() ) {
lastAccelPacket = millis();
modeToggle = true;
return;
}
// Stop motors if accelerometer data is turned off (100ms timeout)
if( millis() - lastAccelPacket > 100 & modeToggle) {
L_MOTOR->run(RELEASE);
R_MOTOR->run(RELEASE);
modeToggle = false;
return;
}
//if no accelerometer, use control pad
if( !modeToggle ) buttonMode();
}
bool accelMode(){
if (packetbuffer[1] == 'A') {
x = parsefloat( packetbuffer + 2 );
y = parsefloat( packetbuffer + 6 );
if( x <= -0.55 ){
x += 0.55;
x *= -100.0;
L_MOTOR->run( BACKWARD );
R_MOTOR->run( BACKWARD );
if( x >= 45 ) x = 45;
if( x <= 0 ) x = 0;
velocity = map( x, 0, 45, 0 ,255 );
}
else if( x >= -0.25 ){
x+= 0.25;
x *= 100;
L_MOTOR->run( FORWARD );
R_MOTOR->run( FORWARD );
if( x>= 45 ) x = 45;
if( x<= 0 ) x = 0;
velocity = map( x, 0, 45, 0, 255 );
}
else{
L_MOTOR->run( RELEASE );
R_MOTOR->run( RELEASE );
velocity = 0;
}
//account for L / R accel
if( y >= 0.1 ){
y -= 0.1;
y *= 100;
if( y >= 50 ) y = 50;
if( y <= 0 ) y = 0;
L_restrict = fscale( y, 0.0, 50.0, 0.0, 100.0, -4.0 );
}
else if( y <= -0.1 ){
y += 0.1;
y *= -100;
if( y>= 50 ) y = 50;
if( y<= 0 ) y = 0;
R_restrict = fscale( y, 0.0, 50.0, 0.0, 100.0, -4.0 );
}
else{
L_restrict = 0;
R_restrict = 0;
}
float Lpercent = ( 100.0 - L_restrict ) / 100.00 ;
float Rpercent = ( 100.0 - R_restrict ) / 100.00 ;
// Serial.print( x );
// Serial.print( "\t" );
// Serial.print( Lpercent );
// Serial.print( "\t" );
// Serial.print( velocity );
// Serial.print( "\t" );
// Serial.println( Rpercent );
L_MOTOR->setSpeed( velocity * Lpercent );
R_MOTOR->setSpeed( velocity * Rpercent );
return true;
}
return false;
}
bool isMoving = false;
bool buttonMode(){
static unsigned long lastPress = 0;
// Buttons
if (packetbuffer[1] == 'B') {
uint8_t buttnum = packetbuffer[2] - '0';
boolean pressed = packetbuffer[3] - '0';
// Serial.println(buttnum);
Serial.println(isMoving);
if (pressed) {
isMoving = true;
if(buttnum == 5){
L_MOTOR->run(FORWARD);
R_MOTOR->run(FORWARD);
}
if(buttnum == 6){
L_MOTOR->run(BACKWARD);
R_MOTOR->run(BACKWARD);
}
if(buttnum == 7){
L_MOTOR->run(RELEASE);
R_MOTOR->run(FORWARD);
}
if(buttnum == 8){
L_MOTOR->run(FORWARD);
R_MOTOR->run(RELEASE);
}
lastPress = millis();
L_MOTOR->setSpeed(255);
R_MOTOR->setSpeed(255);
}
else {
isMoving = false;
L_MOTOR->run(RELEASE);
R_MOTOR->run(RELEASE);
}
return true;
}
// if(isMoving){
// unsigned long timeSincePress = millis() - lastPress;
// if(timeSincePress <= accelTime){
// Serial.println( timeSincePress ) ;
// int motorSpeed = map( timeSincePress, 0, accelTime, 0, 255 );
// L_MOTOR->setSpeed(motorSpeed);
// R_MOTOR->setSpeed(motorSpeed);
// }
// else{
// // full speed ahead!
// L_MOTOR->setSpeed(255);
// R_MOTOR->setSpeed(255);
// }
// }
return false;
}
void BLEsetup(){
Serial.print(F("Initialising the Bluefruit LE module: "));
if ( !ble.begin(VERBOSE_MODE) )
{
error(F("Couldn't find Bluefruit, make sure it's in CoMmanD mode & check wiring?"));
}
Serial.println( F("OK!") );
/* Perform a factory reset to make sure everything is in a known state */
Serial.println(F("Performing a factory reset: "));
if (! ble.factoryReset() ){
error(F("Couldn't factory reset"));
}
//Convert the name change command to a char array
BROADCAST_CMD.toCharArray(buf, 60);
//Change the broadcast device name here!
if(ble.sendCommandCheckOK(buf)){
Serial.println("name changed");
}
delay(250);
//reset to take effect
if(ble.sendCommandCheckOK("ATZ")){
Serial.println("resetting");
}
delay(250);
//Confirm name change
ble.sendCommandCheckOK("AT+GAPDEVNAME");
/* Disable command echo from Bluefruit */
ble.echo(false);
Serial.println("Requesting Bluefruit info:");
/* Print Bluefruit information */
ble.info();
Serial.println(F("Please use Adafruit Bluefruit LE app to connect in Controller mode"));
Serial.println(F("Then activate/use the sensors, color picker, game controller, etc!"));
Serial.println();
ble.verbose(false); // debug info is a little annoying after this point!
/* Wait for connection */
while (! ble.isConnected()) {
delay(500);
}
Serial.println(F("*****************"));
// Set Bluefruit to DATA mode
Serial.println( F("Switching to DATA mode!") );
ble.setMode(BLUEFRUIT_MODE_DATA);
Serial.println(F("*****************"));
}
//Logarithmic mapping function from http://playground.arduino.cc/Main/Fscale
float fscale( float inputValue, float originalMin, float originalMax, float newBegin, float newEnd, float curve){
float OriginalRange = 0;
float NewRange = 0;
float zeroRefCurVal = 0;
float normalizedCurVal = 0;
float rangedValue = 0;
boolean invFlag = 0;
// condition curve parameter
// limit range
if (curve > 10) curve = 10;
if (curve < -10) curve = -10;
curve = (curve * -.1) ; // - invert and scale - this seems more intuitive - postive numbers give more weight to high end on output
curve = pow(10, curve); // convert linear scale into lograthimic exponent for other pow function
/*
Serial.println(curve * 100, DEC); // multply by 100 to preserve resolution
Serial.println();
*/
// Check for out of range inputValues
if (inputValue < originalMin) {
inputValue = originalMin;
}
if (inputValue > originalMax) {
inputValue = originalMax;
}
// Zero Refference the values
OriginalRange = originalMax - originalMin;
if (newEnd > newBegin){
NewRange = newEnd - newBegin;
}
else
{
NewRange = newBegin - newEnd;
invFlag = 1;
}
zeroRefCurVal = inputValue - originalMin;
normalizedCurVal = zeroRefCurVal / OriginalRange; // normalize to 0 - 1 float
/*
Serial.print(OriginalRange, DEC);
Serial.print(" ");
Serial.print(NewRange, DEC);
Serial.print(" ");
Serial.println(zeroRefCurVal, DEC);
Serial.println();
*/
// Check for originalMin > originalMax - the math for all other cases i.e. negative numbers seems to work out fine
if (originalMin > originalMax ) {
return 0;
}
if (invFlag == 0){
rangedValue = (pow(normalizedCurVal, curve) * NewRange) + newBegin;
}
else // invert the ranges
{
rangedValue = newBegin - (pow(normalizedCurVal, curve) * NewRange);
}
return rangedValue;
}
// COMMON SETTINGS
// ----------------------------------------------------------------------------------------------
// These settings are used in both SW UART, HW UART and SPI mode
// ----------------------------------------------------------------------------------------------
#define BUFSIZE 128 // Size of the read buffer for incoming data
#define VERBOSE_MODE true // If set to 'true' enables debug output
#define BLE_READPACKET_TIMEOUT 500 // Timeout in ms waiting to read a response
// SOFTWARE UART SETTINGS
// ----------------------------------------------------------------------------------------------
// The following macros declare the pins that will be used for 'SW' serial.
// You should use this option if you are connecting the UART Friend to an UNO
// ----------------------------------------------------------------------------------------------
#define BLUEFRUIT_SWUART_RXD_PIN 9 // Required for software serial!
#define BLUEFRUIT_SWUART_TXD_PIN 10 // Required for software serial!
#define BLUEFRUIT_UART_CTS_PIN 11 // Required for software serial!
#define BLUEFRUIT_UART_RTS_PIN -1 // Optional, set to -1 if unused
// HARDWARE UART SETTINGS
// ----------------------------------------------------------------------------------------------
// The following macros declare the HW serial port you are using. Uncomment
// this line if you are connecting the BLE to Leonardo/Micro or Flora
// ----------------------------------------------------------------------------------------------
#ifdef Serial1 // this makes it not complain on compilation if there's no Serial1
#define BLUEFRUIT_HWSERIAL_NAME Serial1
#endif
// SHARED UART SETTINGS
// ----------------------------------------------------------------------------------------------
// The following sets the optional Mode pin, its recommended but not required
// ----------------------------------------------------------------------------------------------
#define BLUEFRUIT_UART_MODE_PIN 12 // Set to -1 if unused
// SHARED SPI SETTINGS
// ----------------------------------------------------------------------------------------------
// The following macros declare the pins to use for HW and SW SPI communication.
// SCK, MISO and MOSI should be connected to the HW SPI pins on the Uno when
// using HW SPI. This should be used with nRF51822 based Bluefruit LE modules
// that use SPI (Bluefruit LE SPI Friend).
// ----------------------------------------------------------------------------------------------
#define BLUEFRUIT_SPI_CS 8
#define BLUEFRUIT_SPI_IRQ 7
#define BLUEFRUIT_SPI_RST 6 // Optional but recommended, set to -1 if unused
// SOFTWARE SPI SETTINGS
// ----------------------------------------------------------------------------------------------
// The following macros declare the pins to use for SW SPI communication.
// This should be used with nRF51822 based Bluefruit LE modules that use SPI
// (Bluefruit LE SPI Friend).
// ----------------------------------------------------------------------------------------------
#define BLUEFRUIT_SPI_SCK 13
#define BLUEFRUIT_SPI_MISO 12
#define BLUEFRUIT_SPI_MOSI 11
#include <string.h>
#include <Arduino.h>
#include <SPI.h>
#include <SoftwareSerial.h>
#include "Adafruit_BLE.h"
#include "Adafruit_BluefruitLE_SPI.h"
#include "Adafruit_BluefruitLE_UART.h"
#define PACKET_ACC_LEN (15)
#define PACKET_GYRO_LEN (15)
#define PACKET_MAG_LEN (15)
#define PACKET_QUAT_LEN (19)
#define PACKET_BUTTON_LEN (5)
#define PACKET_COLOR_LEN (6)
#define PACKET_LOCATION_LEN (15)
// READ_BUFSIZE Size of the read buffer for incoming packets
#define READ_BUFSIZE (20)
/* Buffer to hold incoming characters */
uint8_t packetbuffer[READ_BUFSIZE+1];
/**************************************************************************/
/*!
@brief Casts the four bytes at the specified address to a float
*/
/**************************************************************************/
float parsefloat(uint8_t *buffer)
{
float f = ((float *)buffer)[0];
return f;
}
/**************************************************************************/
/*!
@brief Prints a hexadecimal value in plain characters
@param data Pointer to the byte data
@param numBytes Data length in bytes
*/
/**************************************************************************/
void printHex(const uint8_t * data, const uint32_t numBytes)
{
uint32_t szPos;
for (szPos=0; szPos < numBytes; szPos++)
{
Serial.print(F("0x"));
// Append leading 0 for small values
if (data[szPos] <= 0xF)
{
Serial.print(F("0"));
Serial.print(data[szPos] & 0xf, HEX);
}
else
{
Serial.print(data[szPos] & 0xff, HEX);
}
// Add a trailing space if appropriate
if ((numBytes > 1) && (szPos != numBytes - 1))
{
Serial.print(F(" "));
}
}
Serial.println();
}
/**************************************************************************/
/*!
@brief Waits for incoming data and parses it
*/
/**************************************************************************/
uint8_t readPacket(Adafruit_BLE *ble, uint16_t timeout)
{
uint16_t origtimeout = timeout, replyidx = 0;
memset(packetbuffer, 0, READ_BUFSIZE);
while (timeout--) {
if (replyidx >= 20) break;
if ((packetbuffer[1] == 'A') && (replyidx == PACKET_ACC_LEN))
break;
if ((packetbuffer[1] == 'G') && (replyidx == PACKET_GYRO_LEN))
break;
if ((packetbuffer[1] == 'M') && (replyidx == PACKET_MAG_LEN))
break;
if ((packetbuffer[1] == 'Q') && (replyidx == PACKET_QUAT_LEN))
break;
if ((packetbuffer[1] == 'B') && (replyidx == PACKET_BUTTON_LEN))
break;
if ((packetbuffer[1] == 'C') && (replyidx == PACKET_COLOR_LEN))
break;
if ((packetbuffer[1] == 'L') && (replyidx == PACKET_LOCATION_LEN))
break;
while (ble->available()) {
char c = ble->read();
if (c == '!') {
replyidx = 0;
}
packetbuffer[replyidx] = c;
replyidx++;
timeout = origtimeout;
}
if (timeout == 0) break;
delay(1);
}
packetbuffer[replyidx] = 0; // null term
if (!replyidx) // no data or timeout
return 0;
if (packetbuffer[0] != '!') // doesn't start with '!' packet beginning
return 0;
// check checksum!
uint8_t xsum = 0;
uint8_t checksum = packetbuffer[replyidx-1];
for (uint8_t i=0; i<replyidx-1; i++) {
xsum += packetbuffer[i];
}
xsum = ~xsum;
// Throw an error message if the checksum's don't match
if (xsum != checksum)
{
Serial.print("Checksum mismatch in packet : ");
printHex(packetbuffer, replyidx+1);
return 0;
}
// checksum passed!
return replyidx;
}







Comments