
Hardware components | ||||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
Hello everyone,
we are Carlo Albani, Lorenzo Amaducci and Lorenzo Ferraiuolo from Liceo Scientifico A.Oriani, in Ravenna, Italy.
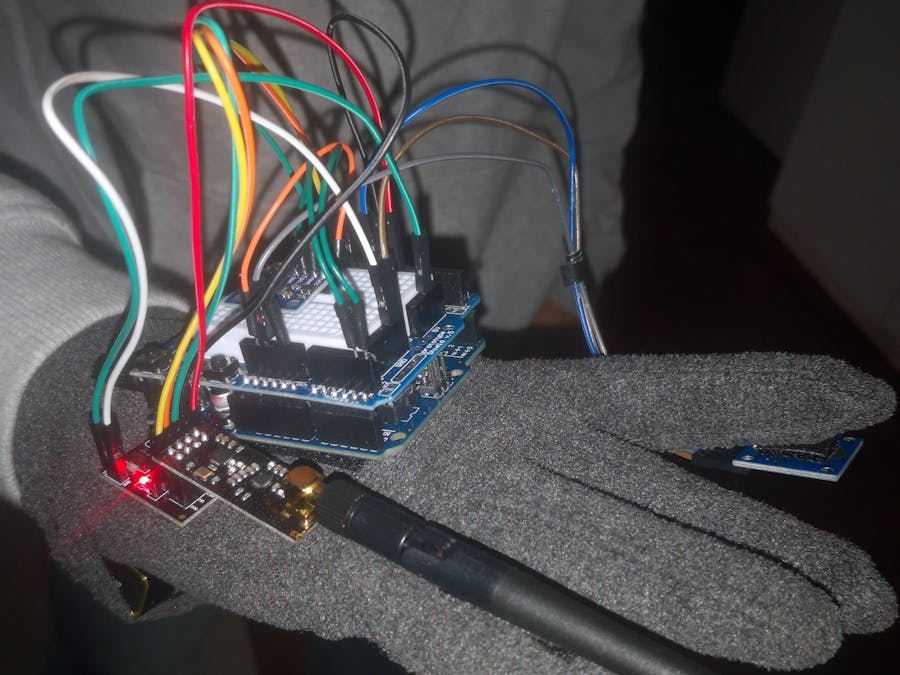
Our Arduino project is called "the Gesture Glove", a glove capable of substituting a computer mouse.
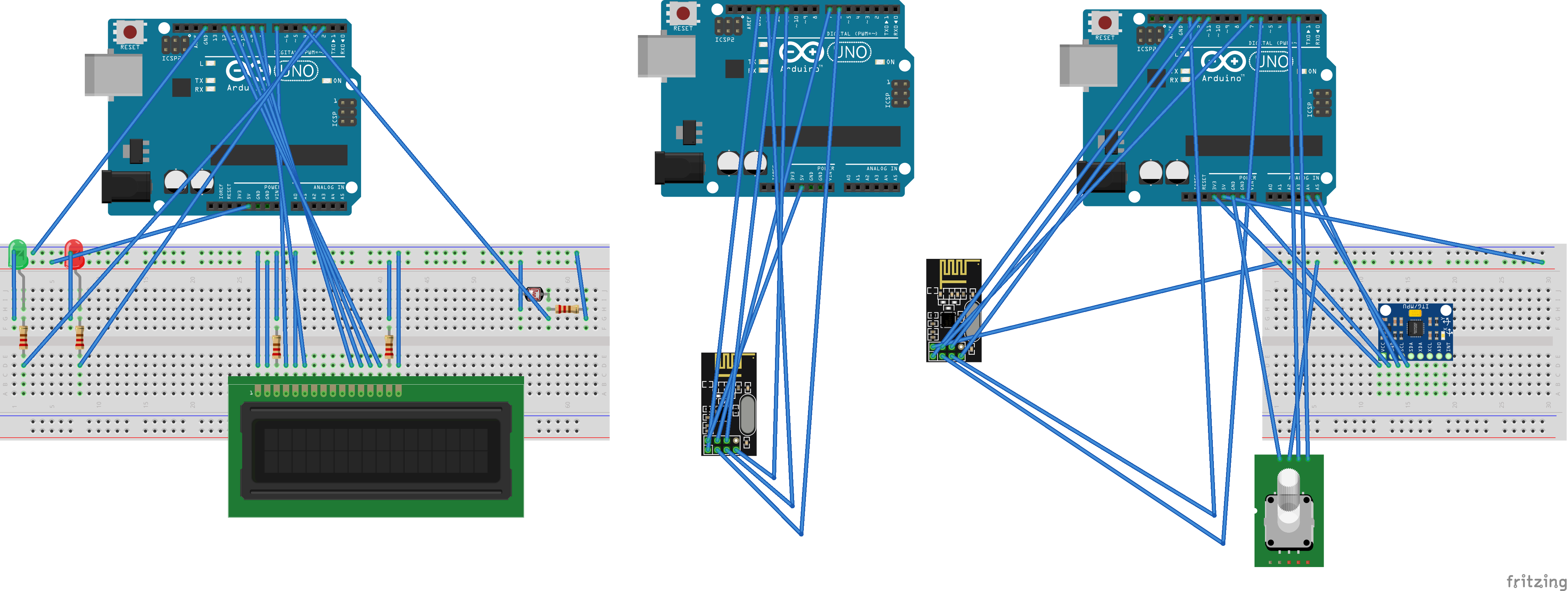
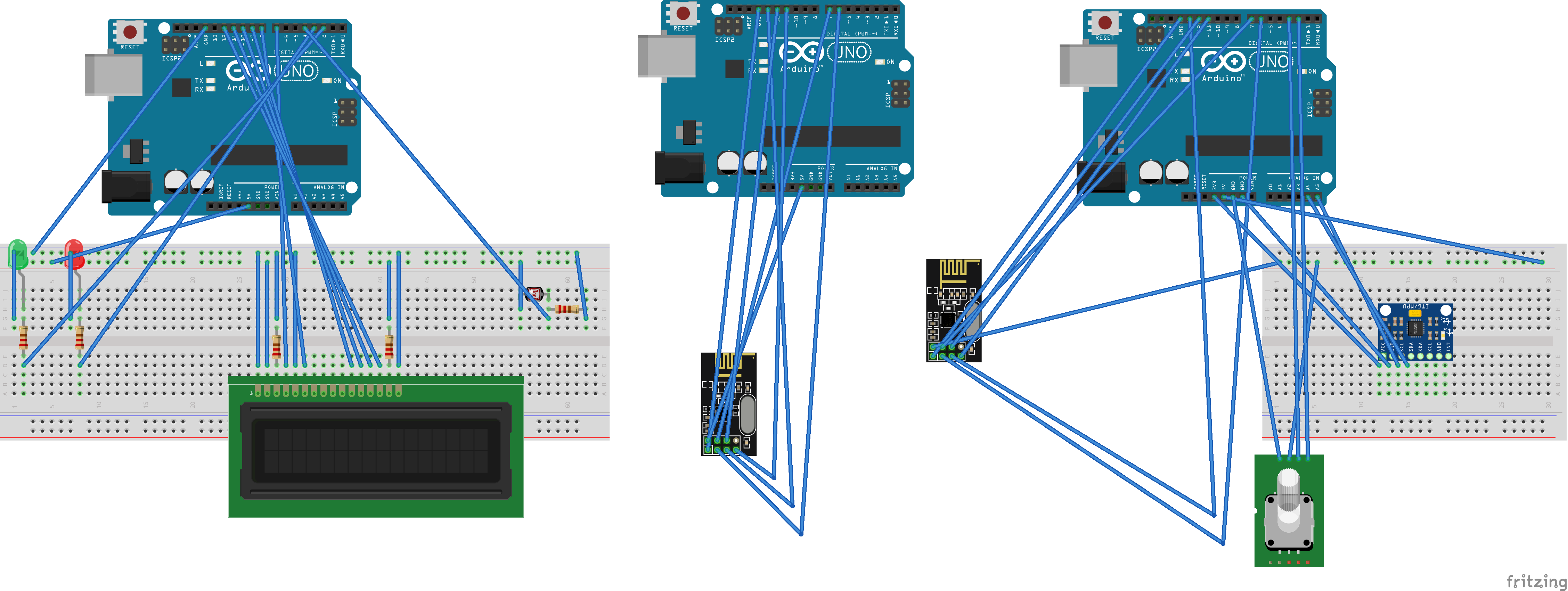
It has a gyroscope, that permits to move into the screen, a touch sensor, positioned on the forefinger, a rotaring encoder which replace the mouse wheel and a Calibrating Box that follow us during the calibration.
Firtly, we understand how the gyroscope works, and then we use it as a cursor.
The Construction Phase consisted in putting all the hardware in the glove, in the following order:
1. Gyroscope, 2. The battery, 3. Touch sensor, 4. Wireless sensor, 5. The rotaring encoder.
The Battery assemble is shown here:
That's the complete Gesture glove:
After this we builded the Calibrating Box, which is essential since the gyroscope need to set, and for doing it, he needs a flat surface.
The Calibrating Box has an LCD Display that gives you the necessary information, it also had two leds:
the first is red and is turning on during the calibration (you have 10 seconds for positioning the glove, in this period of time the led flashes), then when it ends, a green lights turn on and you can start to use the Gesture Glove.
Here's the link for our project's official account, you can go and check the final test, we would really appreciate you stopping by!
We sincerely hope you enjoyed our work and the effort we put in, have a nice day and let us know if you have any question!
INSTAGRAM LINK: https://www.instagram.com/gesture_glove/?hl=it
Albani Carlo Amaducci Lorenzo Ferraiuolo Lorenzo
 lorenzoamaducci
lorenzoamaducci





{kind=link}
Comments