

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
introduction:
Welcome to the world of Arduino-powered robotics, where innovation meets artistry! Wameedh Scientific Club takes immense pride in organizing an annual event that combines the thrill of training and competition in the realm of Arduino robotic arms.
At this remarkable occasion, participants from diverse backgrounds gather to delve into the fascinating world of automation. Through a carefully designed training program, aspiring engineers and robotics enthusiasts gain hands-on experience in constructing their own robotic arms using Arduino technology. These arms are not only functional marvels but also works of art, as participants unleash their creativity in designing and 3D printing unique parts for their creations.
The event serves as a platform to showcase the incredible potential of Arduino-based robotics, particularly with the integration of Bluetooth technology. Each robotic arm becomes a testament to precision and innovation, as participants master the art of controlling their creations wirelessly via Bluetooth connectivity.
The competition aspect adds an exhilarating dimension to the event, as participants put their robotic arms to the test. They face off in thrilling challenges that evaluate the speed, accuracy, and versatility of their creations. It is a true celebration of engineering excellence and the limitless possibilities offered by Arduino.
Through this annual occasion, Wameedh Scientific Club aims to nurture a culture of creativity, technical expertise, and collaborative learning. The event inspires participants to push the boundaries of automation, transforming their ideas into reality. Together, they contribute to the advancement of robotics and pave the way for a future where innovation and art intertwine seamlessly.
steps:
To build a robotic arm, it is important to follow a systematic approach. Here are the steps involved, starting with 3D printing the components of the arm:
3D Printing Components: Begin by designing and 3D printing the necessary components of the robotic arm. This includes the arm segments, joints, gripper, and any other required parts. Ensure that the printed components are accurate, sturdy, and fit together correctly.
- 3D Printing Components: Begin by designing and 3D printing the necessary components of the robotic arm. This includes the arm segments, joints, gripper, and any other required parts. Ensure that the printed components are accurate, sturdy, and fit together correctly.
Assembling the Arm: Once the printed components are ready, proceed with assembling the robotic arm. Follow the design specifications and carefully connect the arm segments and joints. Use appropriate fasteners, such as screws or bolts, to secure the components in place. Pay attention to the range of motion and ensure smooth movement between the arm segments.
- Assembling the Arm: Once the printed components are ready, proceed with assembling the robotic arm. Follow the design specifications and carefully connect the arm segments and joints. Use appropriate fasteners, such as screws or bolts, to secure the components in place. Pay attention to the range of motion and ensure smooth movement between the arm segments.
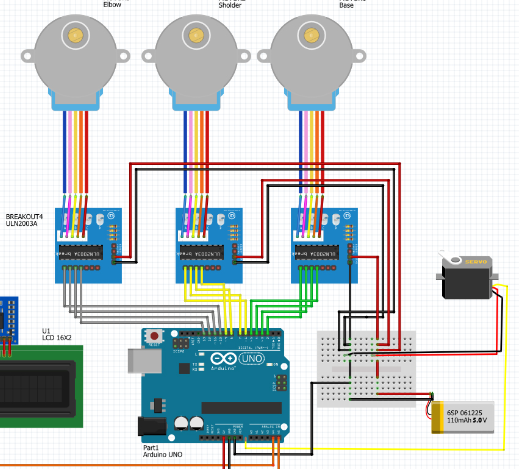
Testing Stepper Motors: With the arm assembled, it is essential to test each stepper motor individually. Connect one stepper motor at a time to the appropriate driver board and power supply. Write a simple Arduino code to control the motor's movement, such as rotating it by a certain angle or controlling its speed. Verify that each motor operates as expected and can move smoothly and accurately.
- Testing Stepper Motors: With the arm assembled, it is essential to test each stepper motor individually. Connect one stepper motor at a time to the appropriate driver board and power supply. Write a simple Arduino code to control the motor's movement, such as rotating it by a certain angle or controlling its speed. Verify that each motor operates as expected and can move smoothly and accurately.
Implementing Bluetooth Connectivity: Next, focus on integrating Bluetooth connectivity into the robotic arm. Incorporate a Bluetooth module, such as the HC-06, into the circuit. Establish a connection between the Arduino and the Bluetooth module, enabling wireless communication.
- Implementing Bluetooth Connectivity: Next, focus on integrating Bluetooth connectivity into the robotic arm. Incorporate a Bluetooth module, such as the HC-06, into the circuit. Establish a connection between the Arduino and the Bluetooth module, enabling wireless communication.
Combining Bluetooth and Stepper Motors: Combine the Bluetooth module with the stepper motors and driver boards. Modify the Arduino code to incorporate Bluetooth commands and control the robotic arm wirelessly. Ensure that the instructions sent via Bluetooth result in the desired movement of the arm.
- Combining Bluetooth and Stepper Motors: Combine the Bluetooth module with the stepper motors and driver boards. Modify the Arduino code to incorporate Bluetooth commands and control the robotic arm wirelessly. Ensure that the instructions sent via Bluetooth result in the desired movement of the arm.
Breadboard Setup: Throughout the construction and testing process, use a breadboard to connect and organize the various electronic components. This helps in prototyping and simplifies troubleshooting and modifications.
- Breadboard Setup: Throughout the construction and testing process, use a breadboard to connect and organize the various electronic components. This helps in prototyping and simplifies troubleshooting and modifications.
By following these steps, you can systematically build and test your robotic arm, starting from 3D printing the components to integrating Bluetooth connectivity. Remember to iterate, fine-tune, and adjust as necessary to achieve optimal performance and functionality.
conclusion:
In conclusion, building a robotic arm is a journey that requires careful planning, technical expertise, and creativity. By following the steps of 3D printing the components, assembling the arm, testing the stepper motors, implementing Bluetooth connectivity, combining Bluetooth with the steppers, and utilizing a breadboard setup, one can bring a robotic arm to life.
Throughout this endeavor, we extend our heartfelt gratitude to Wameedh Scientific Club for organizing and facilitating such a remarkable event. Their dedication to fostering innovation, providing training opportunities, and hosting the annual Arduino Robotic Arm competition has been instrumental in promoting technological advancement and nurturing a passion for robotics.
Wameedh Scientific Club's commitment to excellence and collaboration has not only inspired participants to push their boundaries but has also created a platform where individuals from diverse backgrounds can come together, exchange ideas, and transform their visions into reality.
By combining the art of 3D printing, the precision of stepper motors, and the convenience of Bluetooth connectivity, participants have been able to create unique robotic arms that demonstrate the remarkable potential of Arduino technology.
Thanks to Wameedh Scientific Club's unwavering support and dedication, this event has become a catalyst for innovation, fostering a culture of creativity and technical prowess among aspiring engineers and robotics enthusiasts.
As we look toward the future, it is evident that the field of robotics will continue to evolve, and events like these organized by Wameedh Scientific Club will play a vital role in shaping the next generation of engineers, thinkers, and inventors.
Once again, we express our heartfelt gratitude to Wameedh Scientific Club for their invaluable contribution to the world of robotics and for inspiring us all to reach new heights of technological excellence.
Video at wameedh SC






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments