This project was born out of necessity. As they say: "Necessity is the mother of invention", so did this project come into realization. The need was to be able to wash refuse containers (garbage bins) while the garbage is being collected from the street by the truck. Thus, eliminating the need to send another "specialized" washing truck. This would reduce not just capex but also the operating costs and overheads in parts and maintenance. The first proof of concept was presented as shown in the video below:
First PoC (Proof of Concept)
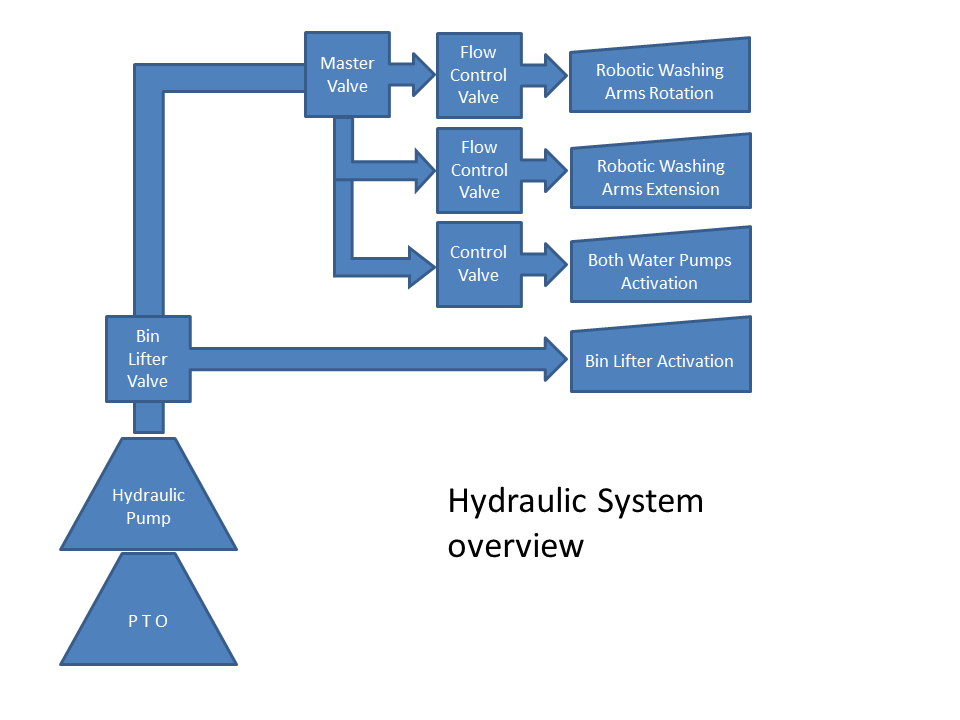
After the PoC was accepted we moved on to implementing the first version (version 1) which was made using a Terberg RosRoca garbage compactor truck mounted with a Terberg TGV2 bin-lifter. We deployed this system just above the packer-sweeper system. This was the first design and was intended to serve 1,100 L & 2,500 L metallic wheelie bins. The first successful run was captured in video below:
One-Stop Rear Loading Compactor & Bin Washer 2-in-1 (version 1)
The final truck presentation video is below:
One-Stop Rear Loading Compactor & Bin Washer 2-in-1 (version 1) - Final Presentation - Bin Washer
This truck was also installed with a high pressure jet water blasting handgun which was also controlled by the PLC. The operator needs to manually switch the water line selection from the robot to the gun line. This is demonstrated below:
One-Stop Rear Loading Compactor & Bin Washer 2-in-1 (version 1) - Final Presentation - HP Gun
After version 1 was successfully deployed in the field, we got orders for more such vehicles with the requirement to wash smaller plastic bins. Thus version 2 came into being:







{kind=link}
{kind=link}

Comments