

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 22 | |||
 |
| × | 6 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
ECG interpretation is a lifesaving skill. To interpret the ECG, one must understand the physiology and science behind it. My aim is to develop a handheld device that will help paramedics, undergraduate residents, school/college students, or anyone interested in ECG interpretation to learn about the mechanism of action. I hope this device will create interest for students to learn and will help interpret ECG. I used simple electronics like LEDs and servo motors to visualize the human heart. By selecting a rhythm in the selector switch, the rhythm selection will be displayed in the LCD and LEDs will glow according to the rhythm selected, created a few algorithms for the visualization of basic arrhythmia.
The main objective of this project is to teach students how the human heart functions.
The heart has 4 chambers and 4 valves: Right Atrium, Left Atrium, Right Ventricle, and Left Ventricle. Tricuspid Valve, Mitral Valve, Aortic Valve, Pulmonic Valve. - The valves prevent the backflow of blood
The human heart has two types of muscle cells for functioning. 1. Contractile cells: Helps in contraction and relaxation of the heart2. Conducting cells: They carry the electricity throughout the heart to contractile cells.
Basic Physiology:
Circulatory System:
The right side of the heart (Right Atrium) receives the deoxygenated blood from the Superior and Inferior vena cava and sends it to the Right Ventricle via the Tricuspid valve. From the Right ventricle, the blood ejects out to the lungs for purification via the Pulmonic valve.
The left side of the heart (Left Atrium) receives the oxygenated blood from the lungs through 4 pulmonary veins and sends it to the Left Ventricle via the mitral valve. From the Left Ventricle, blood is ejected out to the whole body for circulation via the aortic valve.
Conduction System:
SA Node: Natural pacemaker of the heart. Electrical Impulses begin here. AV Node: It lies in between the Atria and ventricles. The impulse from the SA node reaches the AV node. The impulse delays a bit for ventricular filling. Bundle of HIS and Branches: The impulse from the AV node reaches His bundle and bifurcates into Left and Right Bundle Branches. Purkinje Network: The Purkinje network layers up both the ventricles and impulses will make the ventricles to contract and eject the blood out.
Understanding Arrhythmias:
Any deviation from normal rhythm is termed arrhythmia.
SA node - P wave, AV node - PR Interval, Bundle Branches and purkinje network - qRS complex, Ventricle Relaxation - T wave
Normal Sinus Rhythm: It is the heart’s default rhythm. Pacemaker cells in the SA node initiate the impulse at a rate of 60 to 100 BPM.
SA -> AV -> Bundle branches -> Purkinje networks.
Tachycardia > 100 bpm, Bradycardia < 60 bpm.
Junctional Rhythm: Junctional rhythm occurs when the impulse starts at the AV node instead of the SA node. Sometimes the SA node may fire a bit late, AV node takes over and initiates the impulse. Occurs when there is increased automaticity in the AV node coupled with decreased automaticity in the SA node. Intrinsic rate: 40-60 bpm.
AV -> Bundle branches -> Purkinje networks.
Accelerated Junctional: 60-100 bpm Junctional tachycardia > 100 BPM
Ventricular Rhythm: When the SA node is blocked, latent pacemaker cells become active and start conducting. When the ventricle takes over it results in Ventricular Rhythm. There will be no P-waves and qRS will be wide. Both SA and AV node stops producing impulses.
intrinsic rate of 20-40 bpm. Accelerated Ventricular Rhythm: 40-100 bpm, Ventricular tachycardia >100 bpm.
First Degree AV Block: There is a delay in conduction from the atria to the ventricles. The rest of the conduction system remains undisturbed. The PR interval is greater than 200 milliseconds. This condition is always asymptomatic and found only in regular ECG check-ups. When the SA node fires the impulse but delays more than 200 ms in the AV node.
Second Degree AV Block: Type 1: Commonly called Wenckebach / Mobitz1. Progressive prolongation of the PR interval culminating in a non-conducting P wave. It is due to a reversible block at the AV node. Malfunctioning AV node cells tend to progressively fatigue until they fail to conduct an impulse. Some impulses get dropped off without reaching the ventricles. The PR interval will be changing constantly.
Type 2: :
There are intermittent non-conducted P-waves with constant PR interval. It is due to failure of conduction at the level of His bundle type II is more likely due to structural damage to the heart. Mobitz II is an “all or none” phenomenon where His-Purkinje cells suddenly fail to conduct the impulse.
Third Degree AV Block: There is a complete absence of AV conduction. It may be due to profound fatigue of AV Nodal cells and/or complete conduction failure of his-purkinje system. PR interval changes as in Mobitz 1. Here the P wave can be seen merging with qRS complexes. The SA node generates the impulses randomly and sometimes it will get conducted. the ventricular rhythm overrides the situation. Both Impulses fire randomly without sync.
Pulseless Electrical Activity: It occurs when organized electrical activity of the heart persists but the ejection of the left ventricle is not sufficient enough to produce a detectable pulse. Pulseless Ventricular Tachycardia is a life-threatening cardiac arrhythmia where ventricular contractions are very rapid and ineffective contractions. Due to rapid contractions, Cardiac output decreases and pulse is absent. Abnormal ventricular contraction and asynchrony even reduce the effectiveness of contraction and alter the hemodynamics.
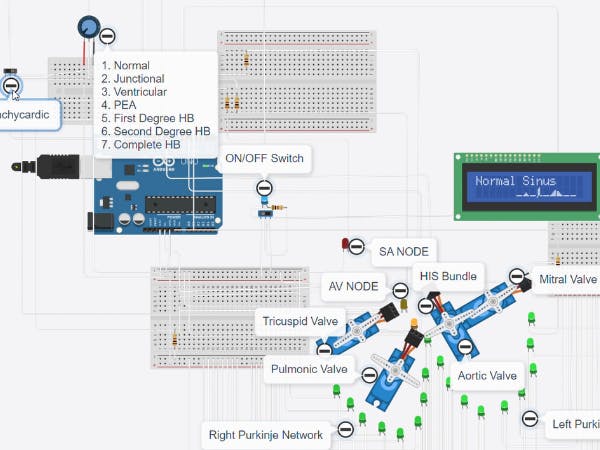
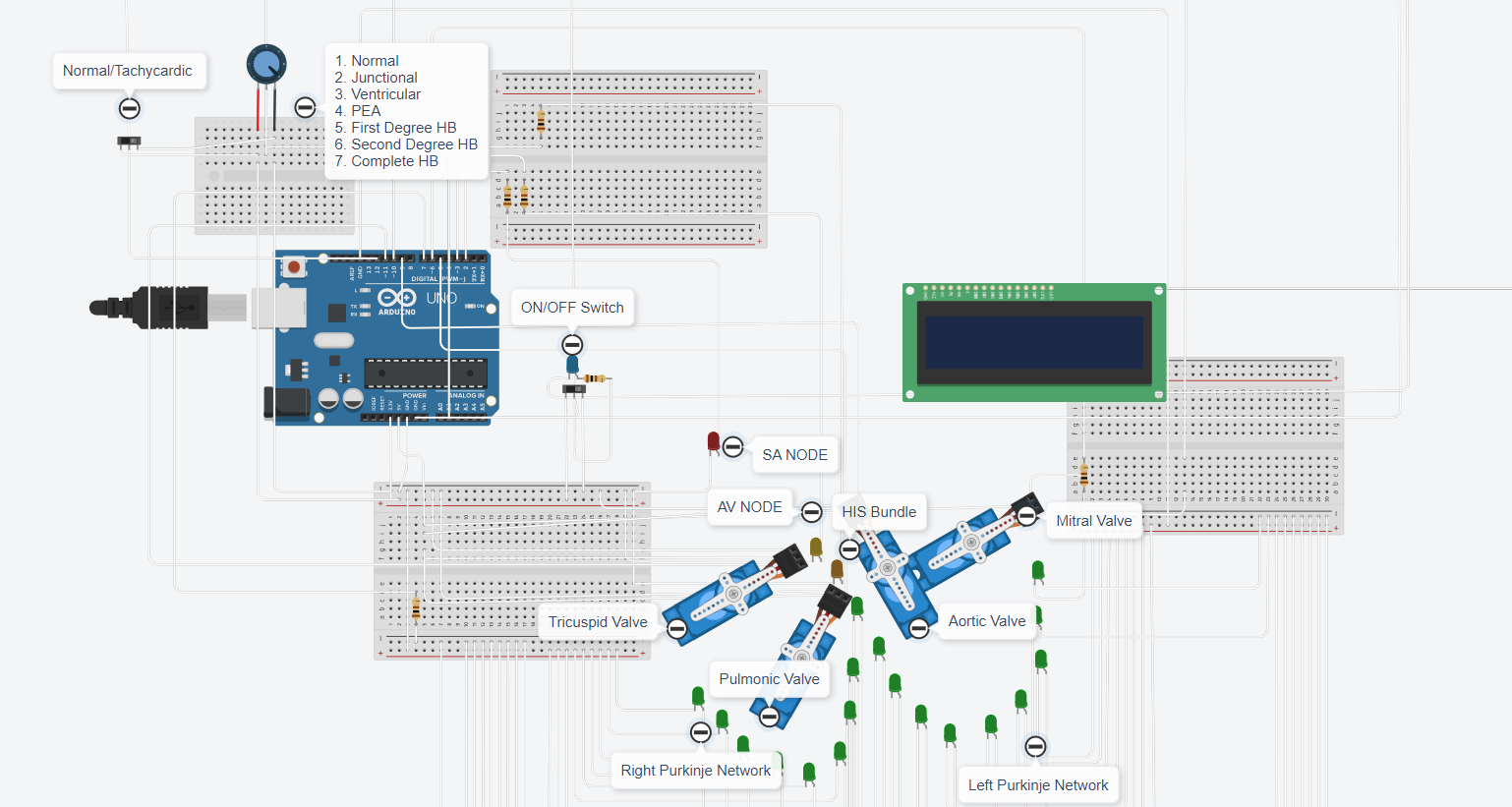
Proposed System: The four valves of the heart were replaced with four servo motors. The conduction system nodes were denoted by LEDs as shown in figure 9. According to the rhythm the LEDs will glow and OFF. Different color LEDs were used to differentiate the nodes. Red – SA Node, Yellow – AV Node, Brown – Bundle of His, Green – Left & right bundles and purkinje fibers.
The device is turned ON by a simple slide switch. The potentiometer acts as a rhythm selector knob. For each level in the potentiometer, a different algorithm is coded. Normal/Tachy slide switch is to toggle fast rate rhythms. All these inputs were fed to the microcontroller (Arduino UNO) and processed. The Selected rhythm is displayed in LCD display and all those LEDs and servo motors function according to the rhythm selected. The Potentiometer is a variable resistor, where we can adjust the resistance by turning the knob. For each position of the potentiometer, the resistance value will differ. So I used it as a rhythm selector knob. The rhythm selector knob offers 7 menus. 1. Normal, 2. Junctional, 3. Ventricular rhythm, 4. Pulseless Electrical activity, 5. First Degree AV Block, 6. Second-degree Blocks, 7. Complete Heart Block.
I hope with the help of this project, students will be able to understand the mechanism of basic arrhythmia.
Future Advancements: The existing system only has few rhythms, The aim is to simulate other complicated arrhythmias in this model.


{kind=link}
Comments