


Hardware components | ||||||
 |
| × | 1 | |||
|
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Now you can control your robot using your smart phone just say commands like move forward, move back, etc...
Essentials:- 1Sheeld board and android smart phone/ Tablet
- Any Arduino board (in this project i used Arduino UNO)
- Rover 5 or any RC car
- Rover 5 motor driver board
- Jumpers
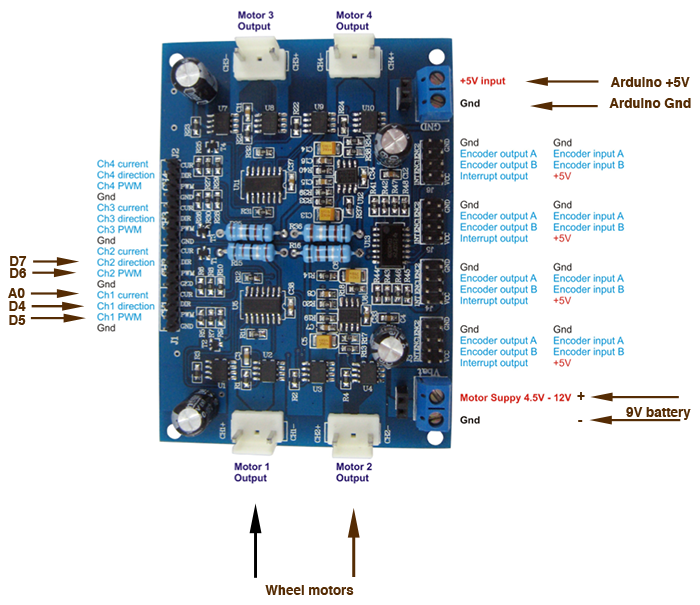
This motor driver can be controlled by simply applying a logic 0 or 1 to the direction pin for that motor and a PWM signal to the speed pin. In this way, the speed and direction of four separate motors can be controlled independently from only 8 GPIO pins. For more details you can check User Manual.
1Sheeld Explained:1Sheeld Android Smartphone Multi-Purpose Shield is an easily configured shield for Arduino. It is connected to a mobile app that allows the use of all of Android smartphones' capabilities such as LCD Screen, Gyroscope, Switches, LEDs, Accelerometer, Magnetometer, GSM, Wi-Fi, GPS …etc. into your Arduino sketch.
How to use 1Sheeld?1- Stack 1Sheeld on top of your Arduino board, and write the code using 1Sheeld library.
2- Pair 1Sheeld board with 1Sheeld app over bluetooth.
3- Select the shields from a list of over 40 shields.
For more information, visit 1Sheeld Tutorials Archive.
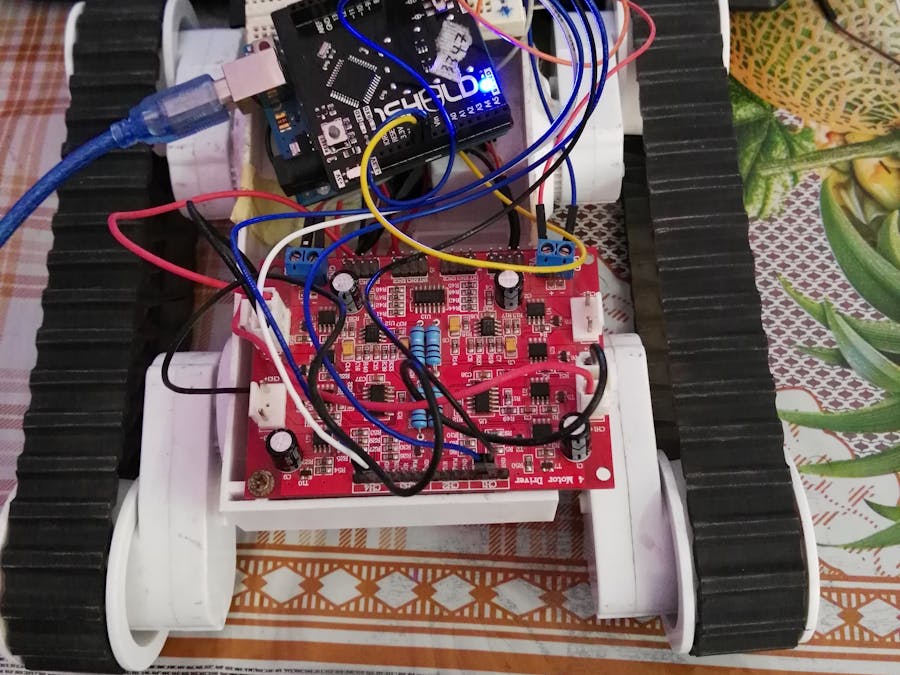
How to Connect the Circuit??As shown in the previous photo connect motor 1 and motor 2.
for channel 1 connect pin 4 in Arduino to Direction pin and pin 5 in Arduino to PWM pin. Then for channel 2 connect direction pin to pin 7 in Arduino and pwm pin to pin 6 in Arduino.
Note that we connect pwm pins in motor drivers to pins 5,6 pins in arduino as these pins in Arduino are PWM pins.
How it Works?Open 1Sheeld app, connect it with 1Sheeld then choose voice recognizer shield,
When you say move forward then the robot move forward.
When you say move back it moves back.
When you say left it turn left.
When you say right it turn right.
When you say stop then it will stop.
Check this video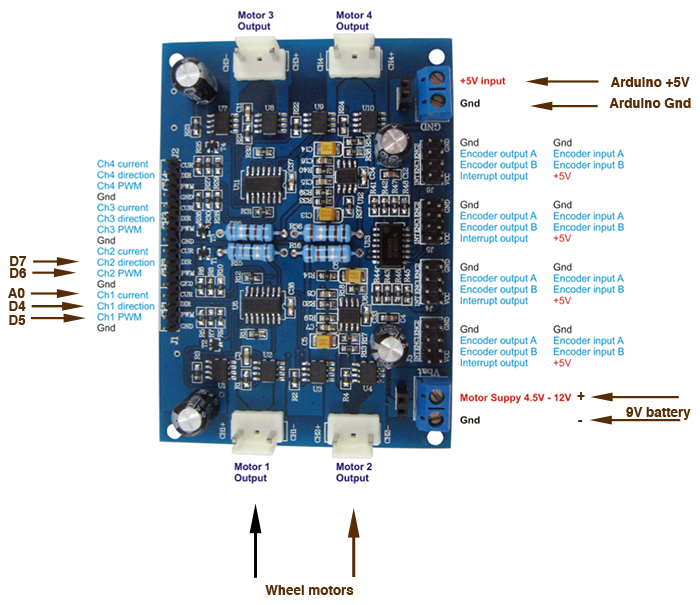






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments