#include <LiquidCrystal.h>
LiquidCrystal lcd(13, 12, 11, 10, 9, 8);
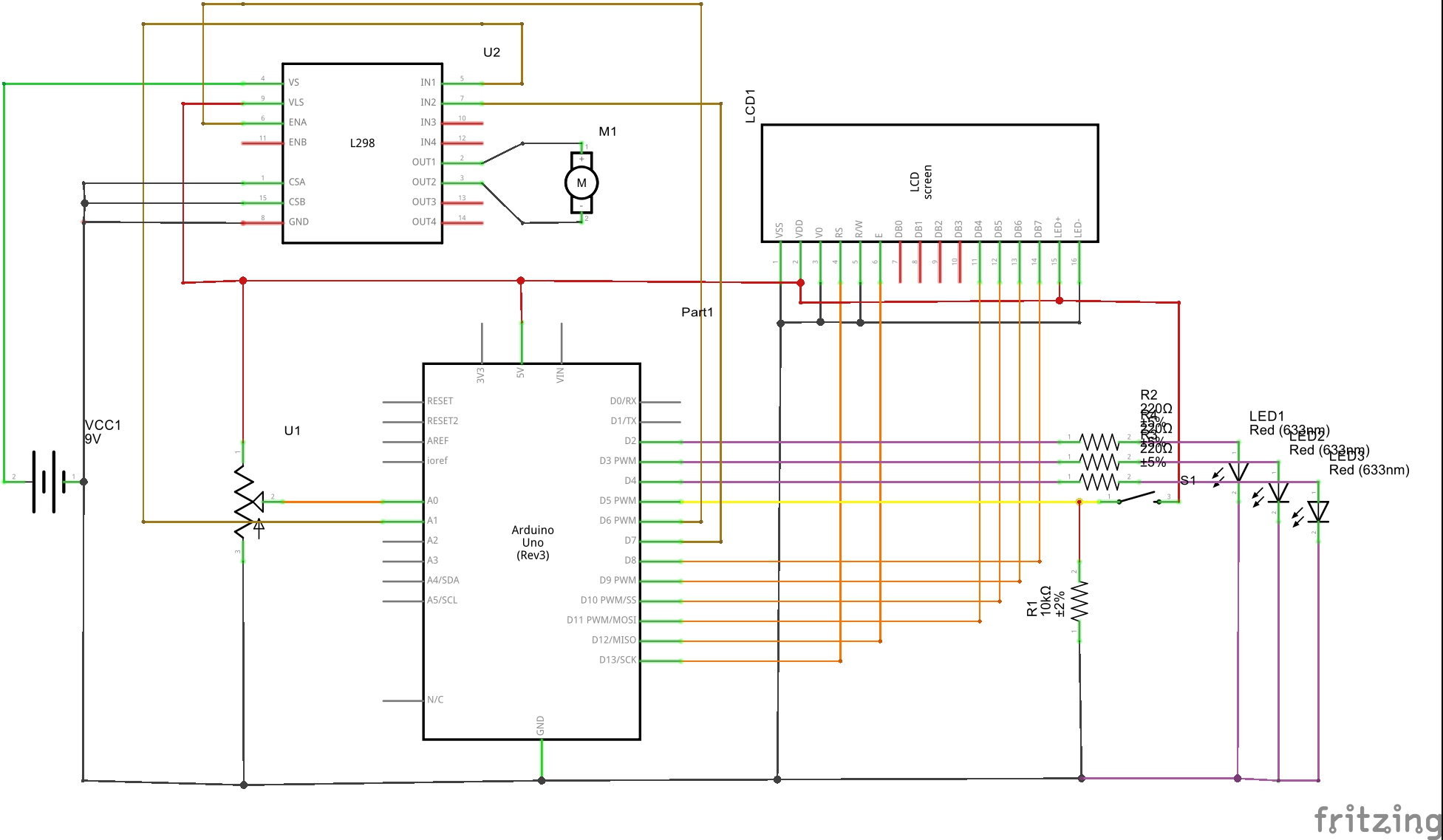
//pin 1 in LCD 1 >>>>>>>>>>>>> ground
//pin 2 in LCD 2 >>>>>>>>>>>>> vcc
//pin 3 in LCD 3 >>>>>>>>>>>>> ground
//pin 4 in LCD 4 >>>>>>>>>>>>> 13
//pin 5 in LCD 5>>>>>>>>>>>>> ground // LCD connection
//pin 6 in LCD 6 >>>>>>>>>>>>> 12
//pin 7 in LCD 7 >>>>>>>>>>>>> NO
//pin 8 in LCD 8 >>>>>>>>>>>>> NO
//pin 9 in LCD 9 >>>>>>>>>>>>> NO
//pin 10 in LCD 10 >>>>>>>>>>>>> NO
//pin 11 in LCD 11 >>>>>>>>>>>>> 11
//pin 12 in LCD 12 >>>>>>>>>>>>> 10
//pin 13 in LCD 13 >>>>>>>>>>>>> 9
//pin 14 in LCD 14 >>>>>>>>>>>>> 8
//pin 15 in LCD 15 >>>>>>>>>>>> vcc
//pin 16 in LCD 16 >>>>>>>>>>> ground
//******************************************************************************************************
const int In1 = A1; //pin 5 in lm298 >>>>>>>> A1 in arduino
const int In2 = 7; //pin 7 in lm298 >>>>>>>> 7 in arduino // L298 motor driver connection
const int En = 6; //pin 6 in lm298 >>>>>>>> 6(PWM) in arduino
// pin 2 in l298 >>>>>>>> Motor pin
// pin 3 in l298 >>>>>>>> Motor pin
// pin 9 in l298 >>>>>>>>> 5 volt
// pin 4 in l298 >>>>>>>>> Motor voltage
//pin 8 in l298 >>>>>>>>> ground
//**********************************************************************************************************
const int Pot = A0; //pin at middle in variable resistance >>>>>>>> A0 in arduino // variable resistance connection
// others pin to VCC & Ground
//**************************************************************************************************************
const int SW = 5; //vcc (5 Volt ) switch for direction with (resistance 10 k to ground ) >>>>>>>>>>>> 5 in arduino // switch connection
//**********************************************************************************************************************
const int red_led = 2; // led with resistance 330 ohm to >>>>>>>>>> 2 in arduino
const int yellow_led = 3; // led with resistance 330 ohm to >>>>>>>>>> 3 in arduino //LED connection
const int green_led = 4; // led with resistance 330 ohm to >>>>>>>>>> 4 in arduino
//***********************************************************************************************************************
volatile float pot_read = 0.0;
volatile int i = 0;
int flag = 1;
//**********************************************************************************************
void red() {
digitalWrite(red_led, HIGH); // open RED LED
digitalWrite(yellow_led, LOW);
digitalWrite(green_led, LOW);
}
//*********************************************
void yellow() {
digitalWrite(red_led, LOW); // open yellow LED
digitalWrite(yellow_led, HIGH);
digitalWrite(green_led, LOW);
}
//**********************************************************************************
void green() {
digitalWrite(red_led, LOW); // open Green LED
digitalWrite(yellow_led, LOW);
digitalWrite(green_led, HIGH);
}
//*****************************************************************************
void CW() {
digitalWrite(In1, HIGH);
digitalWrite(In2, LOW); // Make motor run in Clock wise direction
Serial.println(" Clock Wise ");
}
//*********************************************************************************
void CCW() {
digitalWrite(In2, HIGH);
digitalWrite(In1, LOW); // Make motor run in counter Clock wise direction
Serial.println("counter Clock Wise ");
}
//****************************************************************************
void STP() {
digitalWrite(In1, LOW);
digitalWrite(In2, LOW); // Make motor STOP
Serial.println(" STOP ");
}
//************************************************************************************
//Make input and output pins
void setup() {
// put your setup code here, to run once:
lcd.begin(16, 2);
lcd.print("Speed Control");
delay(1000);
pinMode(In1, OUTPUT);
pinMode(In2, OUTPUT);
pinMode(En, OUTPUT);
pinMode(red_led, OUTPUT);
pinMode(yellow_led, OUTPUT);
pinMode(green_led , OUTPUT);
pinMode(SW, INPUT);
pinMode(Pot, INPUT);
Serial.begin(9600);
}
//*******************************************************************************
void loop() {
pot_read = analogRead(Pot); // read variable resistance
pot_read = pot_read / 4.0;
pot_read = pot_read / 254.0;
pot_read = pot_read * 100.0;
delay(20);
analogWrite(En, pot_read);
lcd.setCursor(5, 1);
lcd.print("PWM =");
lcd.print(pot_read);
lcd.print("%");
Serial.print("PWM =");
Serial.print(pot_read);
Serial.println("%");
// Serial.print(" pot_read= ");
// Serial.println( pot_read );
if (digitalRead(SW) == 1)
{
i++;
switch (i)
{
case 1:
CW();
lcd.setCursor(0, 1);
lcd.print(" CW");
green();
Serial.println(" Clock Wise ");
break;
case 2:
CCW();
lcd.setCursor(0, 1);
lcd.print("CCW");
yellow();
Serial.println("counter Clock Wise ");
break;
case 3:
STP();
red();
lcd.setCursor(0, 1);
lcd.print("STP");
Serial.println(" STOP ");
i = 0;
break;
}
while (digitalRead(SW) == 1);
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments