


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 4 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
Below is a video that goes through all the steps to assembling and running the traffic lights using the Arduino Look the Demonstration video HERE
IntroductionIf you're a beginner in Arduino and have a plan to make your first robot, then here's the tutorial for you
In this tutorial I am going to show how to make an Arduino robot with different functionalities. We can learn the use of different programs for different functions, mainly a smart phone controlled robot
This project will involve using a little a bit of code and a very simple circuit that’s great for beginners.
The video further down this page will go through all the steps to completing this very cool DIY Wireless Bluetooth Car project.
This project aims to control the Car using wireless technology. This will serve as a base to build more amazing projects on home automation and many more automation projects.
The project based on HC-05Bluetooth module which Controlling L293D Motor Driver which Controls Motor
A Bluetooth controlled RC Car content many electronics components for different works like Bluetooth module HC-05, Arduino, motor driver, motors etc. In this article I make sure for all the steps to make this awesome Bluetooth control RC car in some hours with code.
The bluetooth control RC car is a very good start to learn embedded systems and robotics. in these projects you will learn the interfacing of sensors, coding for robots and cars, and many other things.
Working on BasicsThe Motor have been powered by L293D Motor Driver which is Powered by Arduino UNO (Board). It contains a code which uploaded to the board. And once it simulated you can connect with Bluetooth Module (HC-05) with you compatible device
Once code have been uploaded and Connected the Bluetooth and start Sending Command through app known as Bluetooth Electronic and start Sending Command you will be able to see that the desire Command which have been sent through app start's car Moving Accordingly.
Refer to this video there is full instruction how to Download and Use app and how to use app. CLICK HERE
UsgaeThere is multiple Use of Project:-
- You can came to know how to use Bluetooth with Arduino.
- You can came to know how to use Bluetooth with Arduino.
- If you are a beginner and want to control Arduino with Smartphone so you can do with the help of this.
- This is very Interesting RC Toy which is controlled through Mobile.
- You will Learn to know how to code and control appliances with Bluetooth
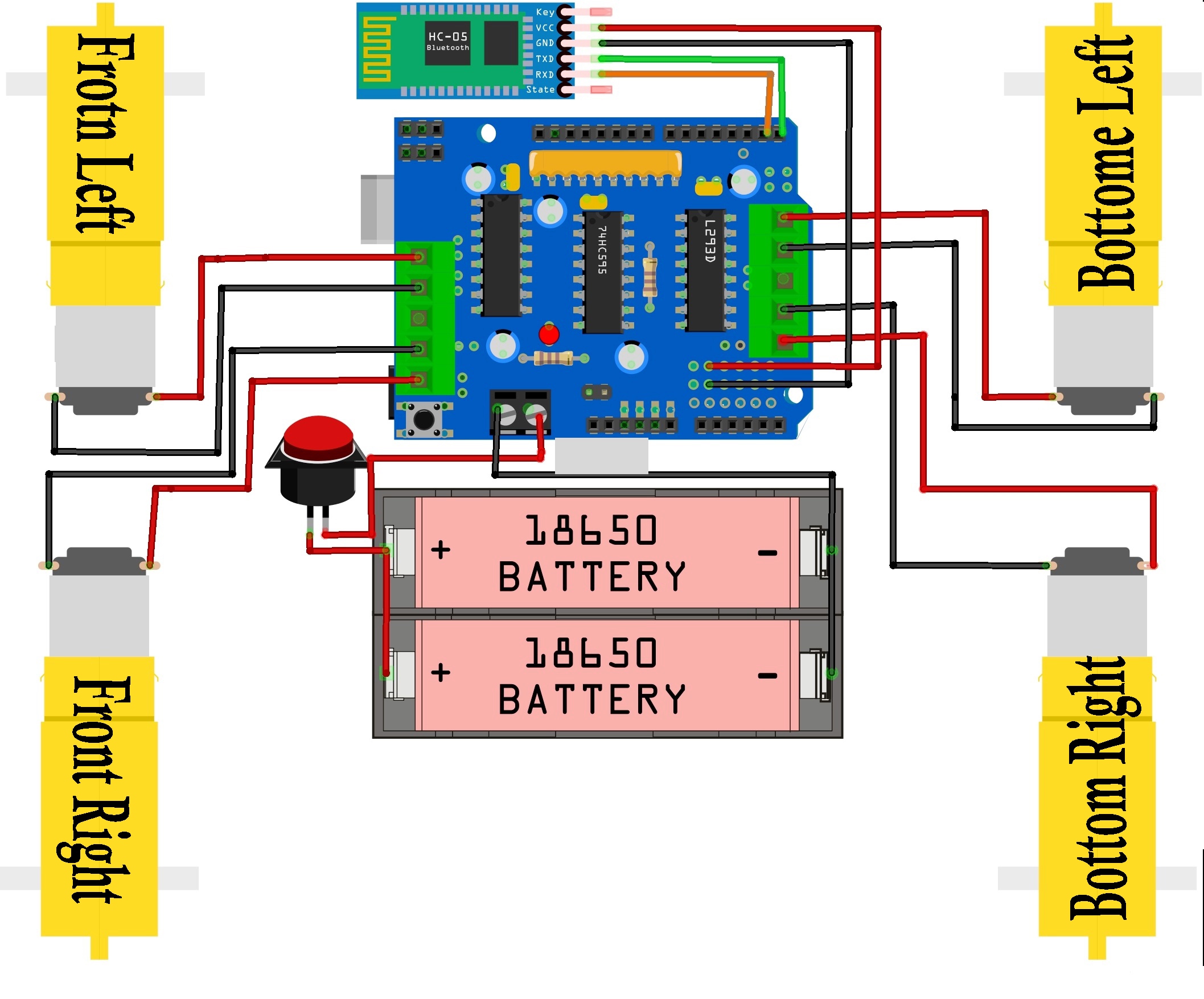
Connection of HC-05
- Hook the GND pin (Negative Pin) of HC-05 to Pin GND of Arduino.
- Connect VCC Pin (Positive Pin) of HC-05 to VCC of Arduino.
- Connect TX pin (Data Transfer Pin) of HC-05 to RX pin of Arduino.
- Connect RX Pin of HC-05 to TX Pin of Arduino.
Connection of Motor
- Connect Front Left Motor with M1 of L293D Motor Driver.
- Connect Front RightMotor with M2 of L293D Motor Driver.
- Connect Bottom Left Motor with M3 of L293D Motor Driver.
- Connect BottomRightMotor with M4 of L293D Motor Driver.
Connection of Battery and Switch
Connect 2 18650 Battery Positive Wire with Button and 2 Pin of Button with M+ of L293D
Connection Negative Wire to Power GND of L293D
Uploading and Testing- Copy or download the code attached with the project.
- Don't forgot to download the AFMotor.h library from HERE.
- Download the app known as Bluetooth Electronics available on Play Store. CLICK HERE to download.
- Build up Button to control Motor using the app. To Watch video how to Build up button CLICK HERE
- Once complete setup you will able to control send command using your Device
CLICK HERE
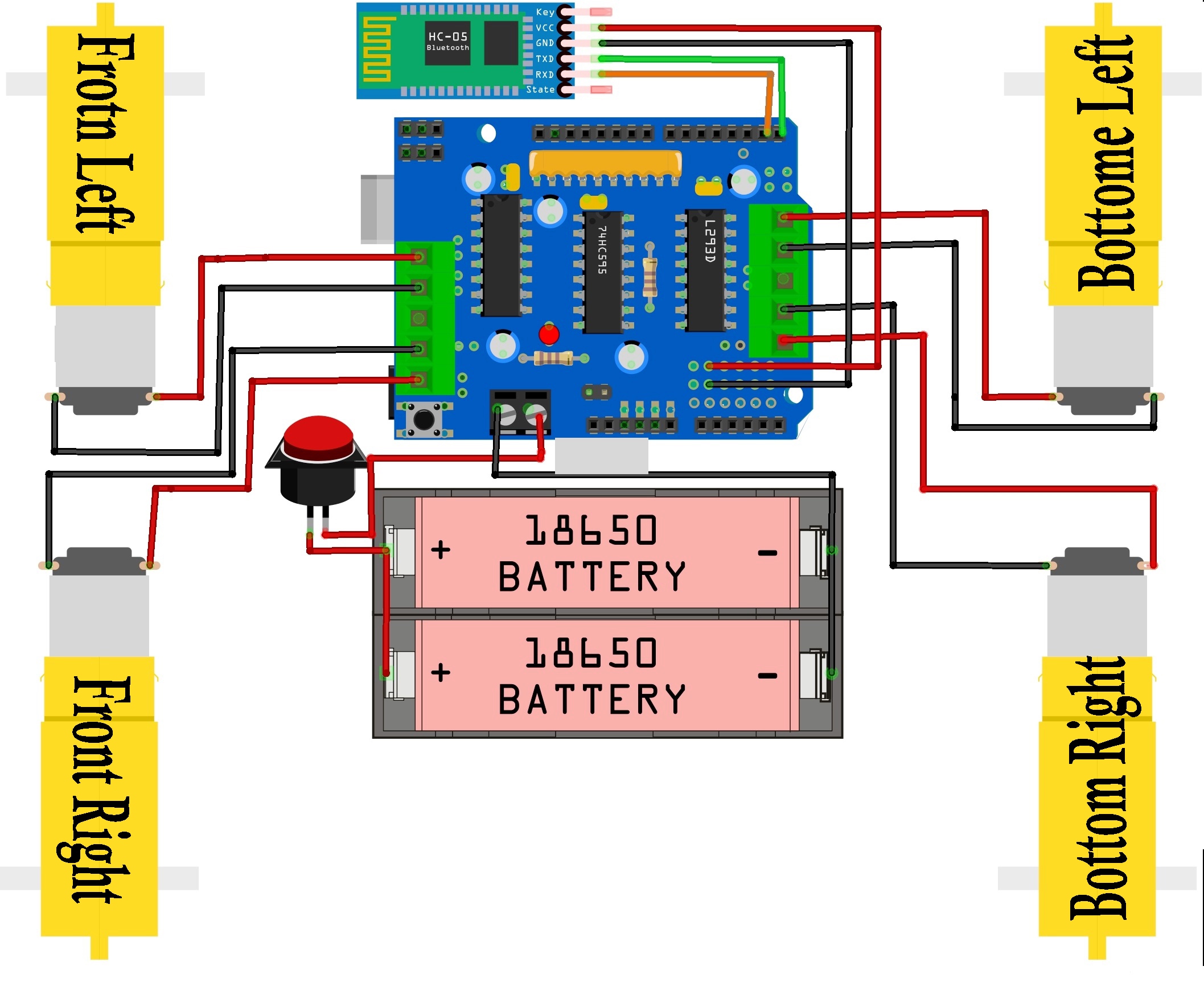
Circuit Diagram
Hook the GND pin (Negative Pin) of HC-05 to Pin GND of Arduino.
Connect VCC Pin (Positive Pin) of HC-05 to VCC of Arduino.
Connect TX pin (Data Transfer Pin) of HC-05 to RX pin of Arduino.
Connect RX Pin of HC-05 to TX Pin of Arduino.
Connection of Motor
Connect Front Left Motor with M1 of L293D Motor Driver.
Connect Front Right Motor with M2 of L293D Motor Driver.
Connect Bottom Left Motor with M3 of L293D Motor Driver.
Connect Bottom Right Motor with M4 of L293D Motor Driver.
Connection of Battery and Switch
Connect 2 18650 Battery Positive Wire with Button and 2 Pin of Button with M+ of L293D
Connection Negative Wire to Power GND of L293D





{kind=link}
Comments