

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
| ||||||
Fascinated by this humorous anthropomorphic idea on instructables that left me philosophizing deeply about the essence of art, I decided to make this a project after witnessing many ruthless battles between human and robot on youtube.
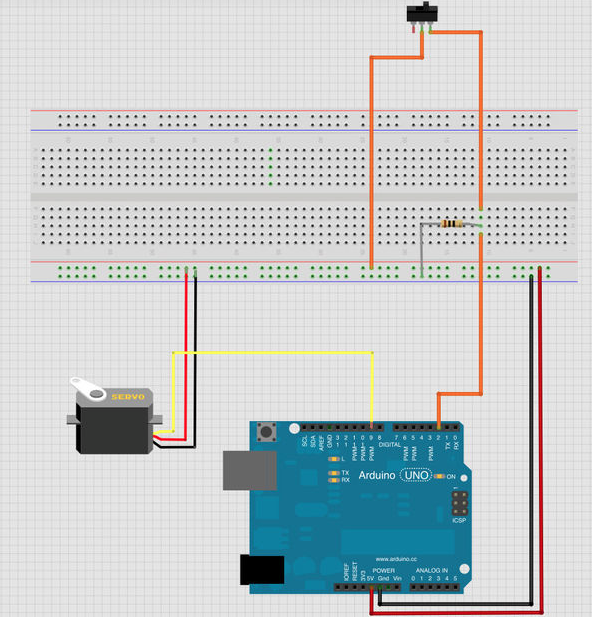
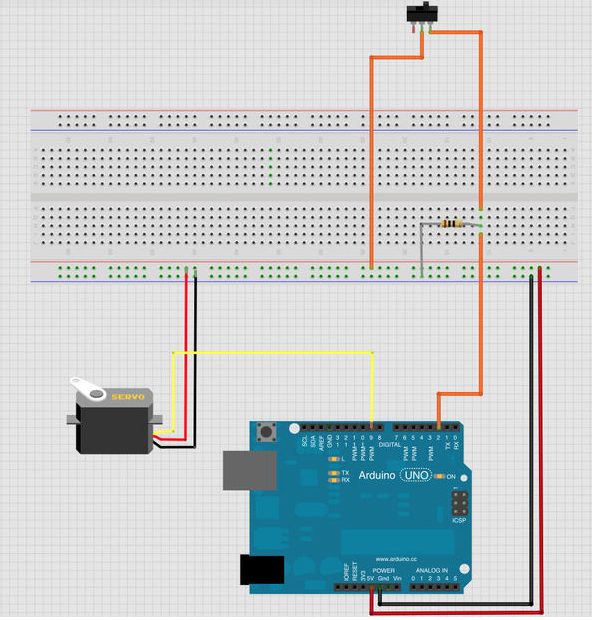
How does it work?
The Arduino "listens" to the state of the switch and actuates the servo when the switch is activated.
In the OFF state, the Arduino sends the servo to the reset position. When a user flips the switch to ON, the Arduino sends a signal to the servo and actuates a finger to push the switch to the OFF state.
The Arduino "listens" to the state of the switch and actuates the servo when the switch is activated.
Instructions
1. Program the Arduino.
2. Make the schematics using 9v battery, wires, breadboard, 10 ohm resistor, Arduino, and a switch.
3. Launch Arduino.
4. Make a box with cardboard. [I made it large enough to house the breadboard.]
5. Create servo housing and the finger. [Here, I used a rectangular cardboard with a hole as housing for servo motor and dental floss to secure the bind of the finger and servo motor. The finger is made with multiple layers of S-shaped cardboard.]
6. Test the angle of movements and adjust numbers in the program. Make sure there is enough force for the finger to push the switch off.
7. Wire and attach power supply
8. Test the Most Useless Machine Ever and voila!
Note:
Move the Arduino to the side so when the finger rotates, it does not get in the way.
Attach the 9V power supply to the Arduino. Remember to detach the battery when not in use or else it will drain your battery.
{kind=link}
Comments