


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
CONCEPT: Automated robot arm.
AUTHOR: ADKI NISHANTH.
About: Usually, a robot-arm is a programmedmechanical arm capable of doing the work that almost a human can accomplish in work areas. The main ideology is to supplant the human efforts with mechanised robo-arm, especially at areas with risks in factories. Usually, this arm is framed using joints that lead to rotational motion (arm is not endowed with displacement motion). The end effector of the arm is simple in design, different from that of human hand.
Working: Microcontroller is the backbone of the arm.Without this microcontroller, the arm can be considered as a toy without life. Usually, this microcontroller instructs the arm for picking small things with rotational motions. Also this microcontroller supplies power to the arm from the power source.
There are wide varieties of microcontrollers available, among those, Arduino and Raspberry are more preferred ones... But wait...what actually a microcontroller is? Usually, a microcontroller can be considered as a mini-computer or a circuit designed for specific operation. CPU and all other elements are integrated onto this single board.
The microcontroller opted for the arm is Arduino. There are many types that include Arduino UNO, Arduino NANO, Arduino Lilypad, Arduino Leonardo, Arduino MINI, Arduino Micro etc... But Arduino UNO is most preferred one.
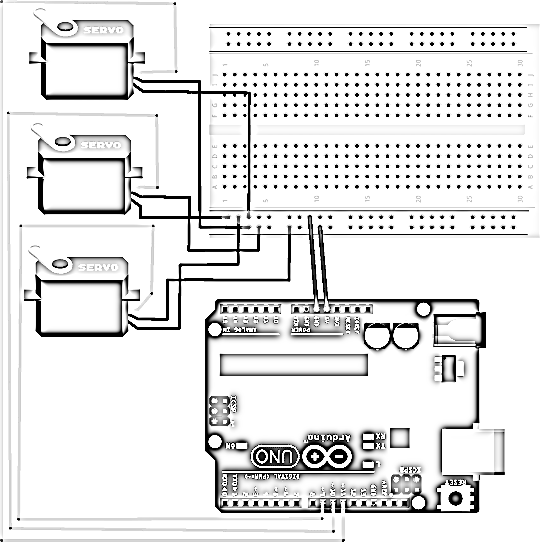
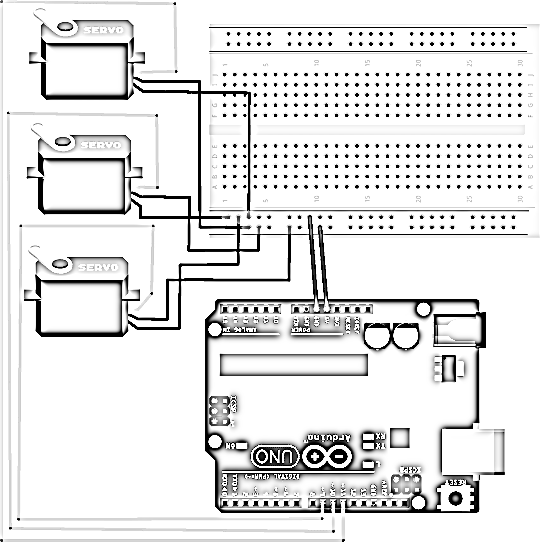
A Zero PCB(Printed Circuit Board) is also used to support connections between peripheral(robo-arm) and Arduino.Connections are made according to the requirements using jumper wires and male/female header pins.
SERVO motor is used to support rotational motion in the arm. Usually, a SERVO motor is different from a DC motor where in SERVO motor, the rotation can be controlled to desired degree.<SERVO.h> header file is included in the software to include all the functions related to SERVO.
Connections:


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments