
Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
I was browsing the TechCrunch website a while ago, when I stumbled on an article talking about gesture recognition technology being used to open door locks. While the product is not out yet, I thought to do my best with my smartphone and some components I have laying around.
Step 1: What We Need to BeginHardware
- An Arduino board (I am using an Arduino Uno here)
- One micro servo
- One door bolt (the one i am using is already mounted on the door)
- Male to male jumper wires
- A piece of striped wire
Software
- The Arduino IDE which you can download here
- Get the 1Sheeld Arduino library and the phone app here
PS: Make sure to go through the 1Sheeld intro tutorial here and how to use 1Sheeld with different Arduino boards here. I will be using Arduino Uno for the rest of the tutorial.
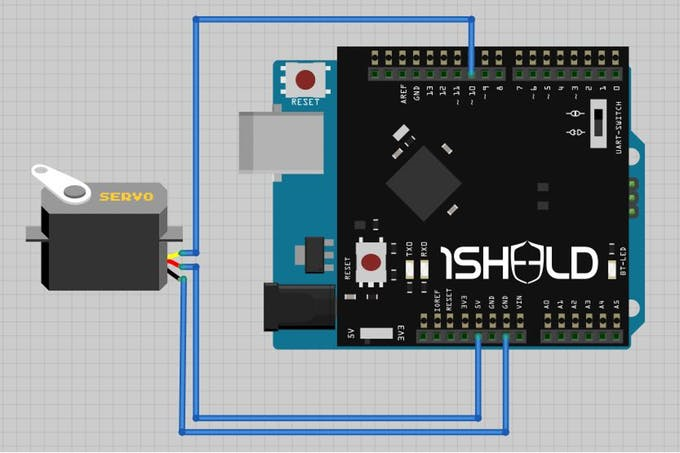
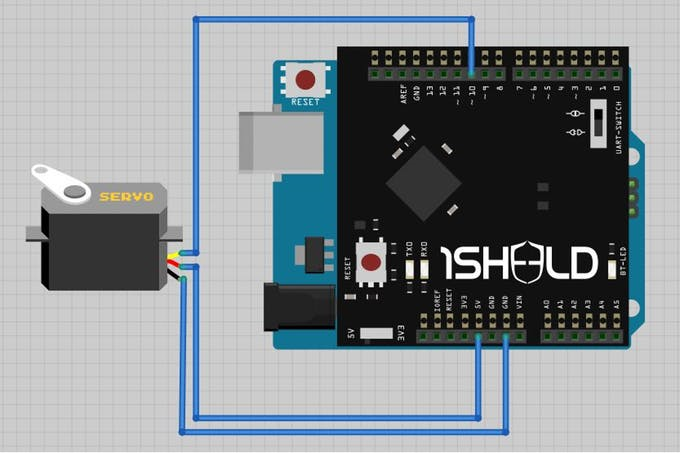
Step 2: Wiring and SetupMake sure the power switch shown above is turned to 5V (for Arduino Uno users) if you're using another Arduino board check here.
- Mount the 1Sheeld on the Arduino board
- Connect your servo motor as shown in figure
VCC ==> to the 5V in your 1Sheeld GND ==> to your GND in 1Sheeld
Signal ==> to pin 10 in your 1Sheeld
Step 3: Software- Simply, the code reads the values of your phone's accelerometer and checks for a predefined gesture.
- Upload the attached code and let's move to the next and final step.
PS: Make sure the 1Sheeld is in upload mode as seen in the image above.
Step 4: Putting It All Together- Mount the components on the back of the door as seen in pictures.
- Attach the servo to the bolt using the striped wire.
- Connect the servo to the 1Sheeld as specified in step 2.
- Connect the Arduino to your laptop and make sure the code is uploaded.
- Switch the 1Sheeld back to operating mode.
- Open your 1Sheeld app and connect your phone to your 1Sheeld board (check 1Sheeld tutorial here if you haven't already).
- Select the accelerometer and buzzer shields (the first two from the top), and press on the multiple shields icon at the top right of the app.
- Now, hold your phone flat -screen facing upward, rotate your phone left until the screen is facing left, and put your phone in an upright position. (Or you can watch the video :D)
- Voilà! The door is unlocked (and will automatically re-lock after a short delay).
Finally I want to encourage you to tinker around with the project; add or remove from it however you see fit. And if there's anything I can help you with, please let me know.
PS: Tune the delay to see what works best for you.
AdhamN
 ahmed ismail
ahmed ismail


{kind=link}
Comments