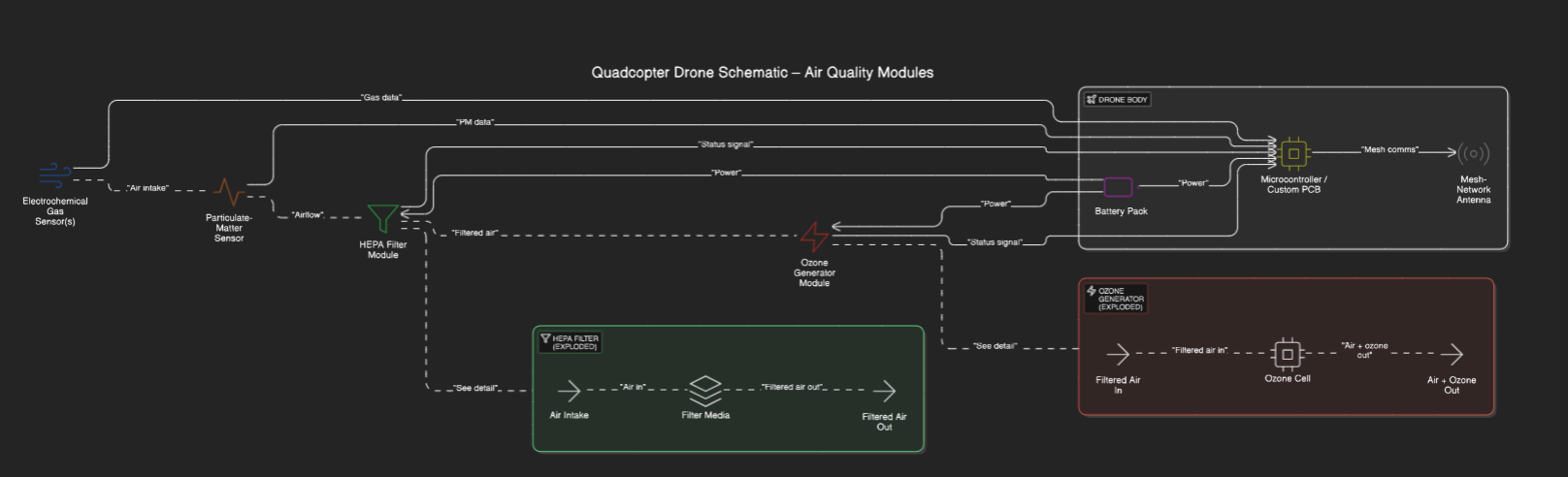
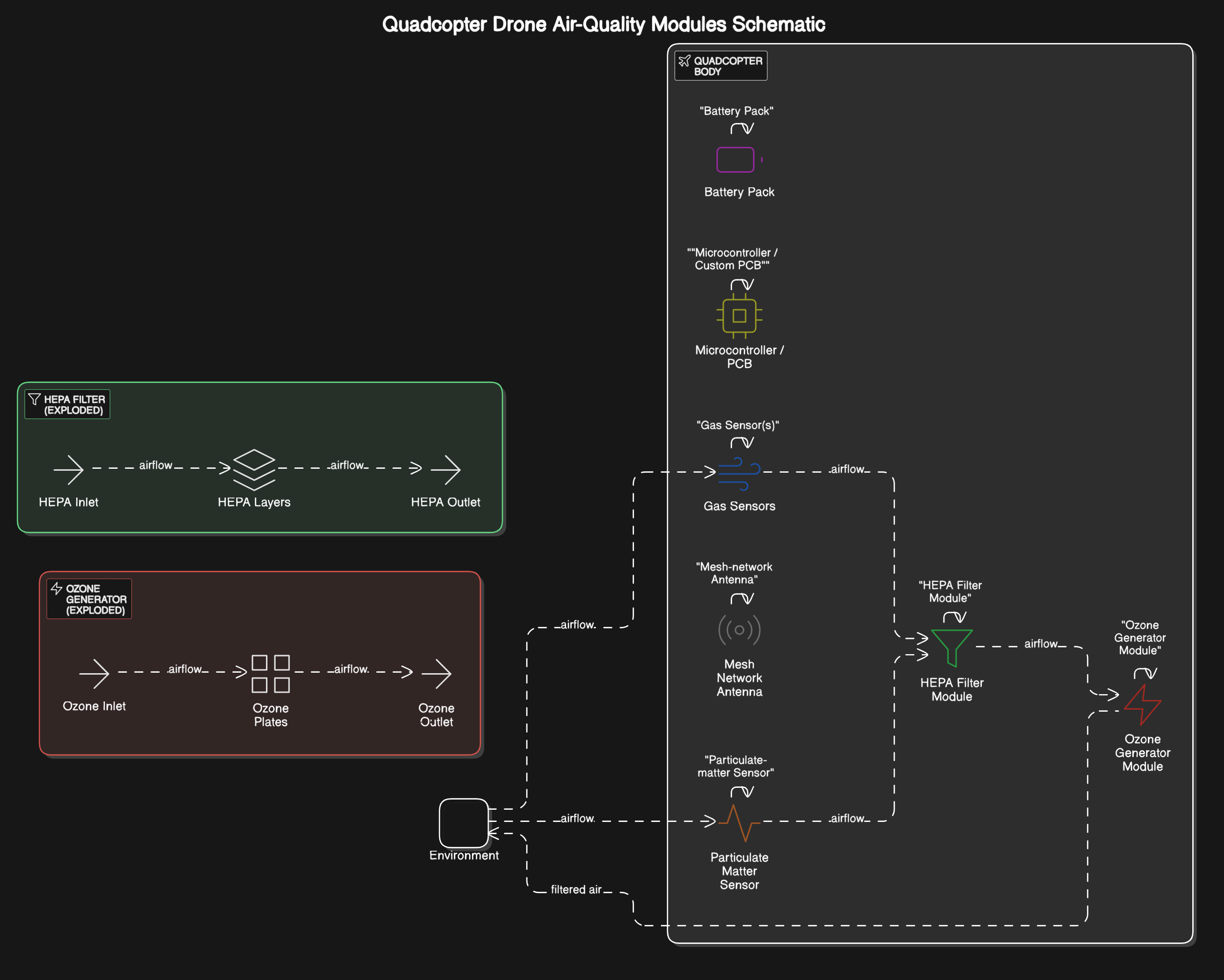
Our drone is a clever, indoor air cleaner that not only detects air pollution but also cleans it. Using gas and particle sensors, it noiselessly maneuvers around a room, detecting and locating the area with the most air pollution and bringing the fresh air back to you through its built-in filter or a mild ozone spray.
We developed this product because there are so many of us that spend our day indoors with little awareness of bad air quality. Rather than simply displaying air quality numbers on a screen, we wanted to develop a device that does something as well, so you can always experience refreshing air in your home, office or clinic.
Here is how it works: the drone screeches through a room in a grid pattern, using small sensors to map where pollutants are located. It streams the data to the cloud using the secure mesh network where our software can tell you where the bad air is located. It then hovers above the trouble spots and switches on the HEPA filter or ozone module and automatically works to clean the air as it is seen using real time information. Every component from the 3D printed frame to the PCBs obtained from PCBWay, has been designed to work together perfectly to keep your air clean.








_qDT2N5Sg1I.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}
{kind=link}

Comments