*This project is featured in DFRobot's blog. Please refer their blog here.
*This project is nominated in Postscapes IoT Awards under category Best IoT DIY Project.
IoT Home Security Model can be remotely accessed by using any smart device and PC to monitor the security status within the house through the data collected from sensors through the Internet.
Promo Video
Promo Video for IoT Home Security Model
When security mode is turned on, any recognized harmful activities that occurred within the house will be detected through installed sensors and automatically forward the alert message to the homeowner through the internet. The data from sensors will constantly be stored in the cloud storage and interact with the custom web-based application that enables it to display the data in a website, and this allows the homeowner to have an advantage to monitor any potential harmful activity that might occur within the house in real-time. Another additional feature of security in this project is Access Control Technology, this system uses the (NFC) "Near Field Communication" approach to provide access to the recognized individuals (guests or family members) with the rights to enter the house.
Full Demonstration Video
Full Demonstration for IoT Home Security Model
Origin
This project originally titled "Android WiFi and Web Based Application for Home Security System" and is my final year project submission during my last year of engineering in University. At that time, this project is still full of bugs and not as real-time as it should be ( data-latency could more than 2 seconds! ).
Now I took some of my free time to refurbish this project and make it much closer to real-time, and the result is quite satisfying.
Structure for this project
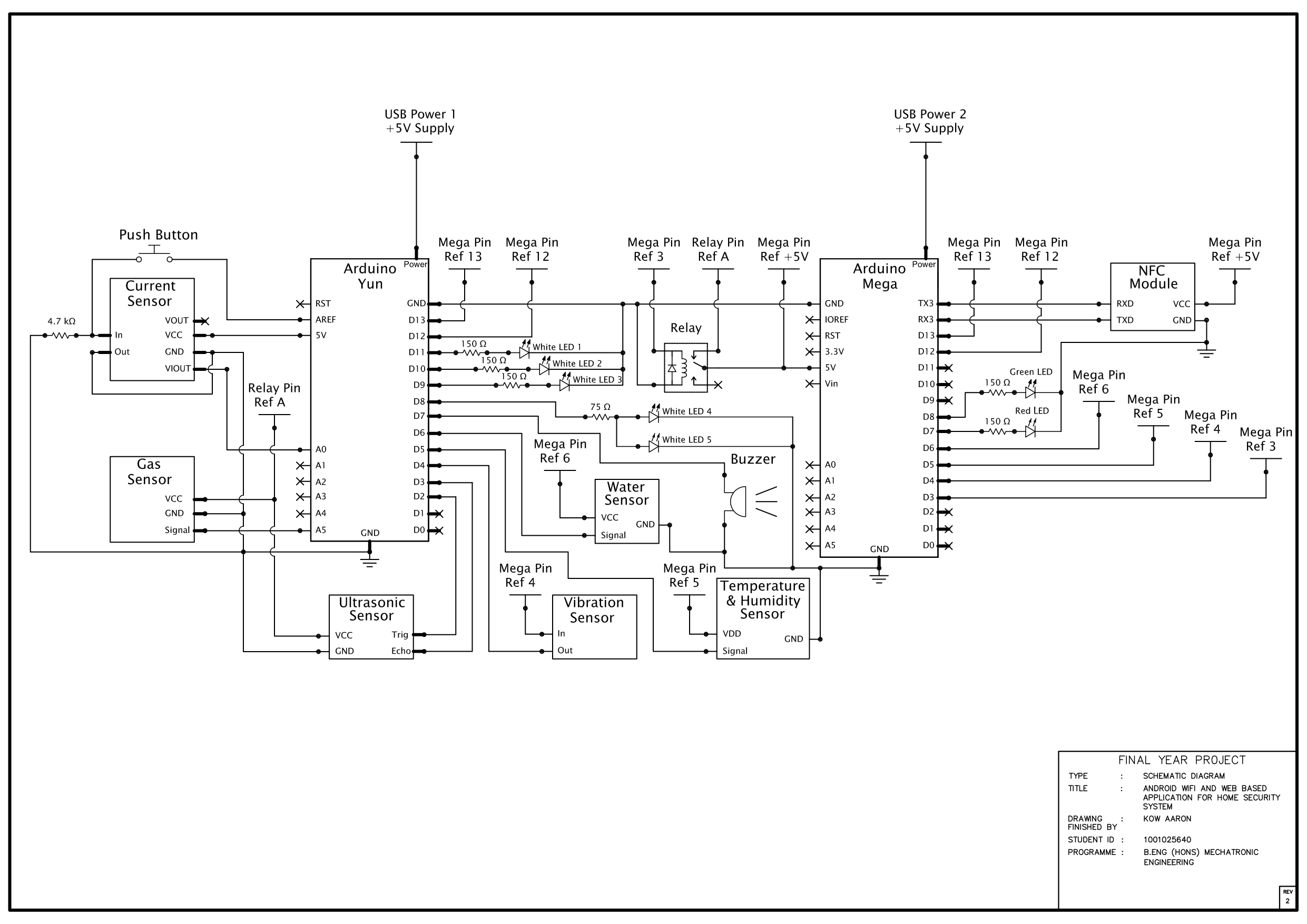
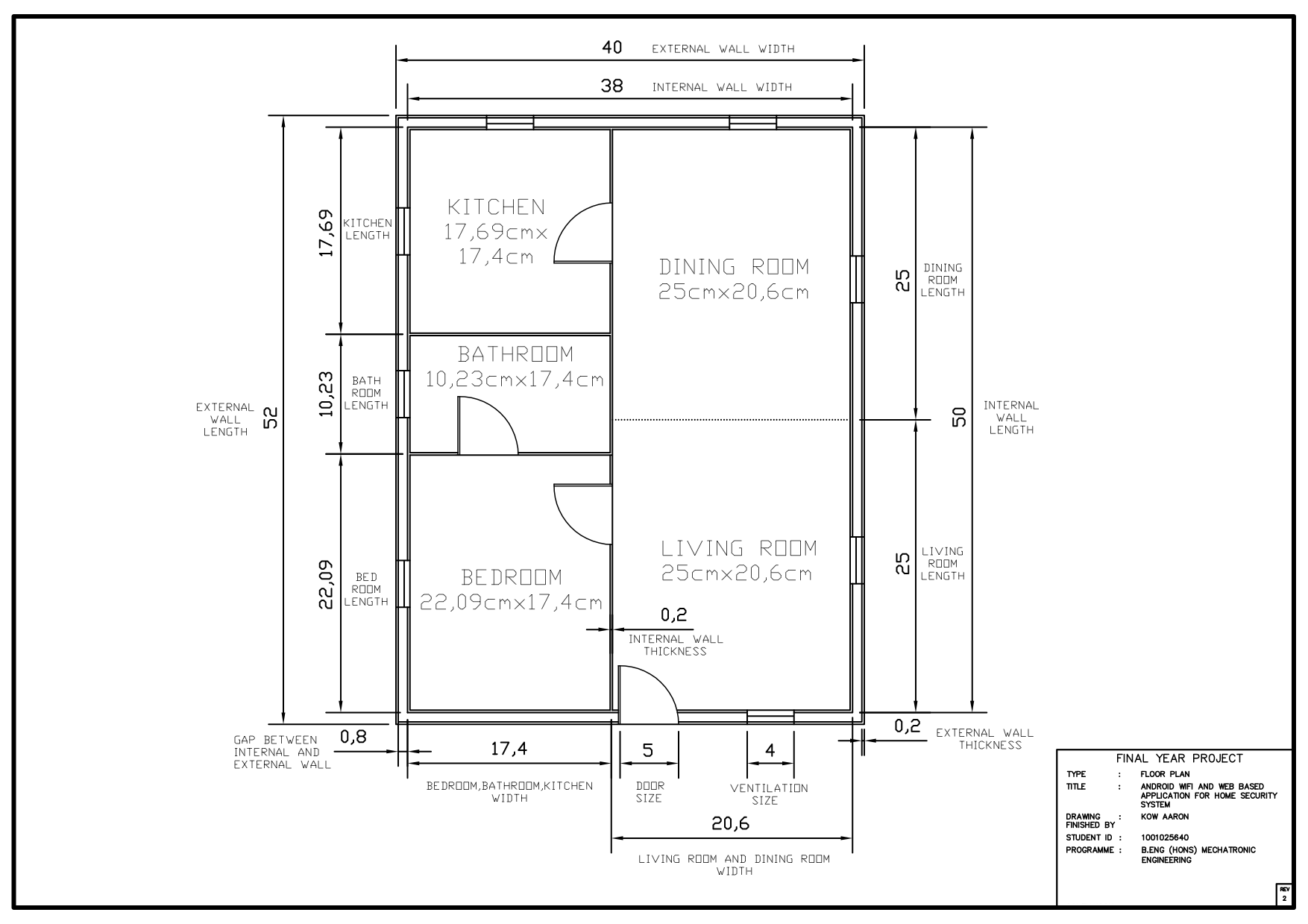
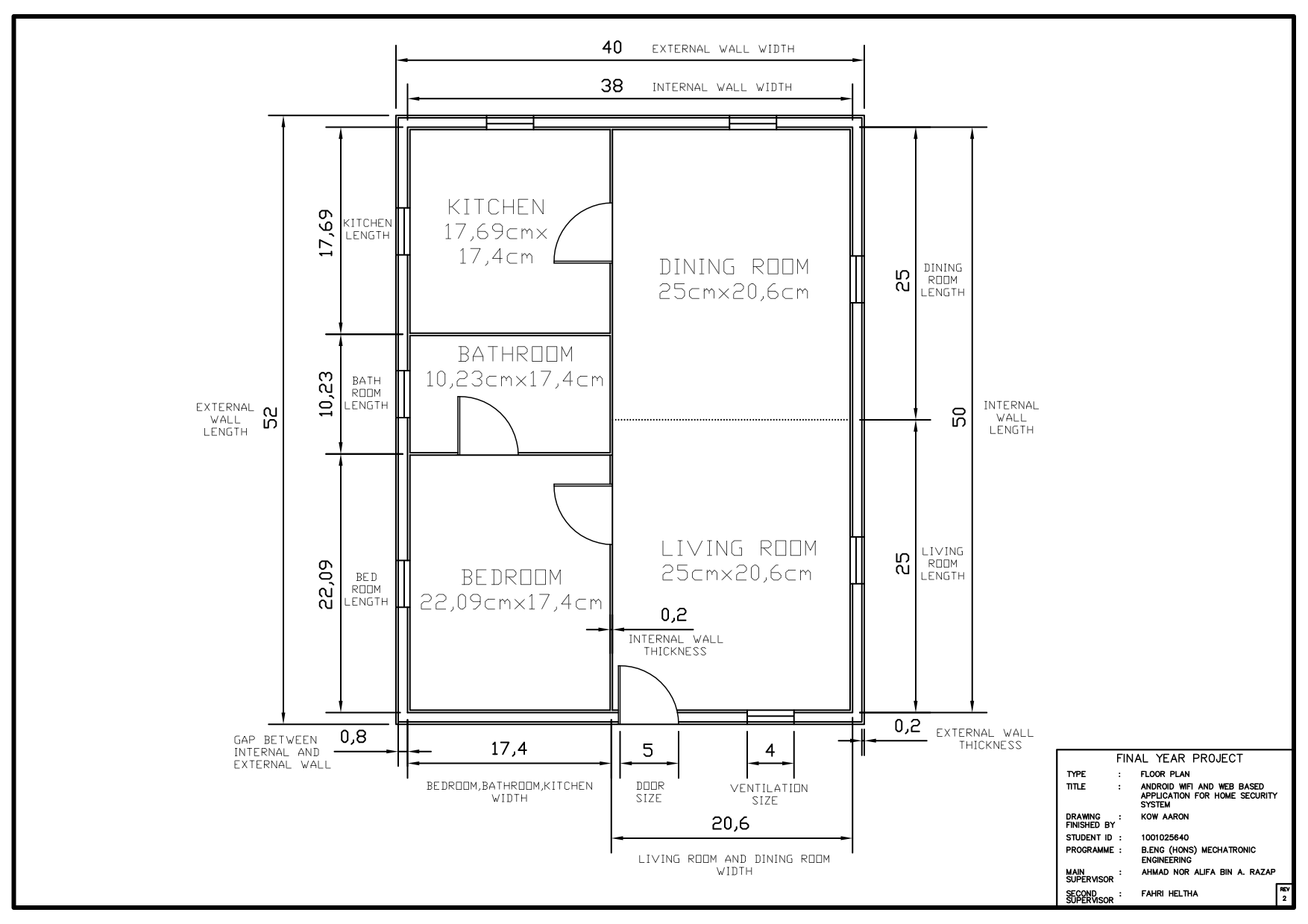
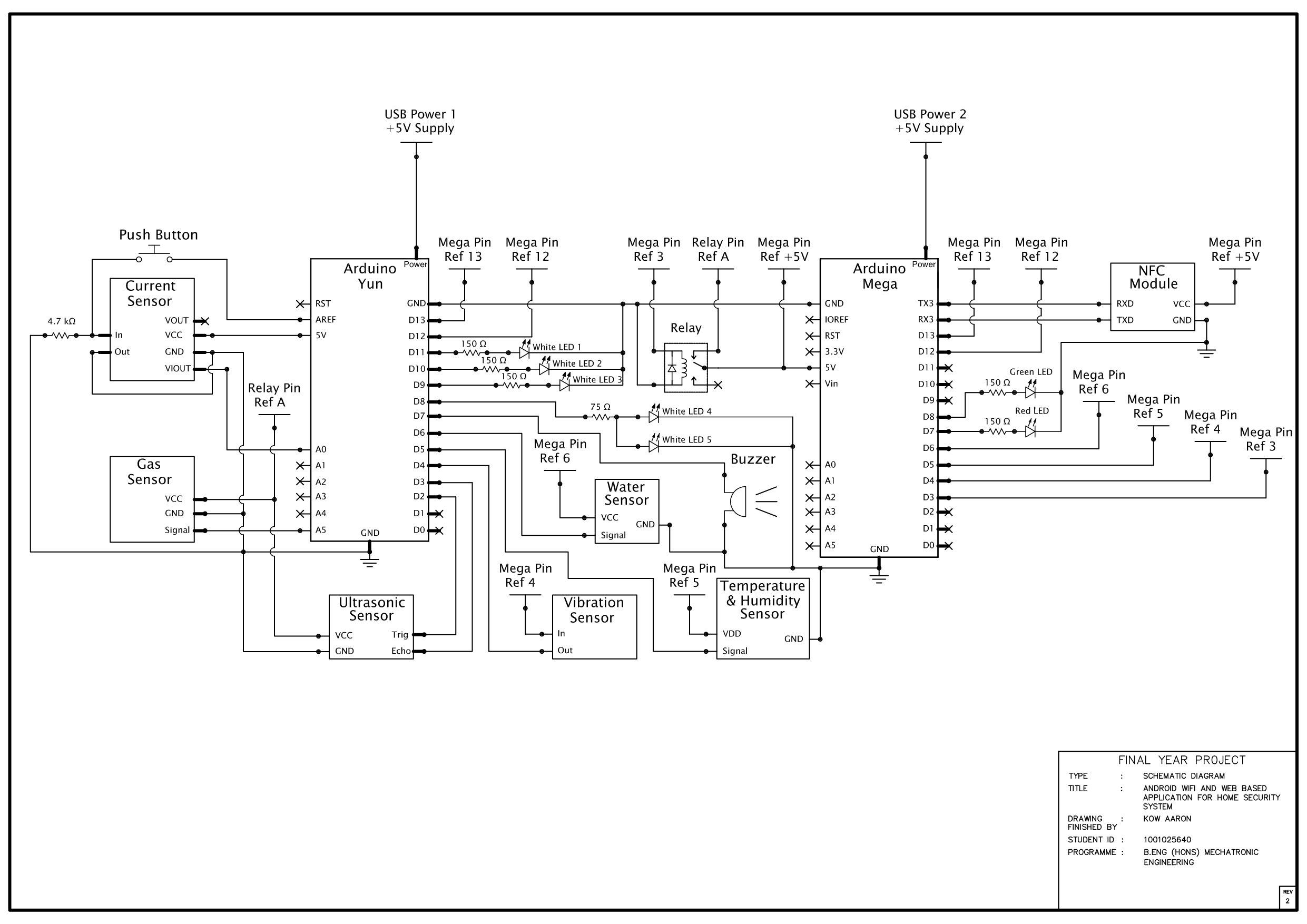
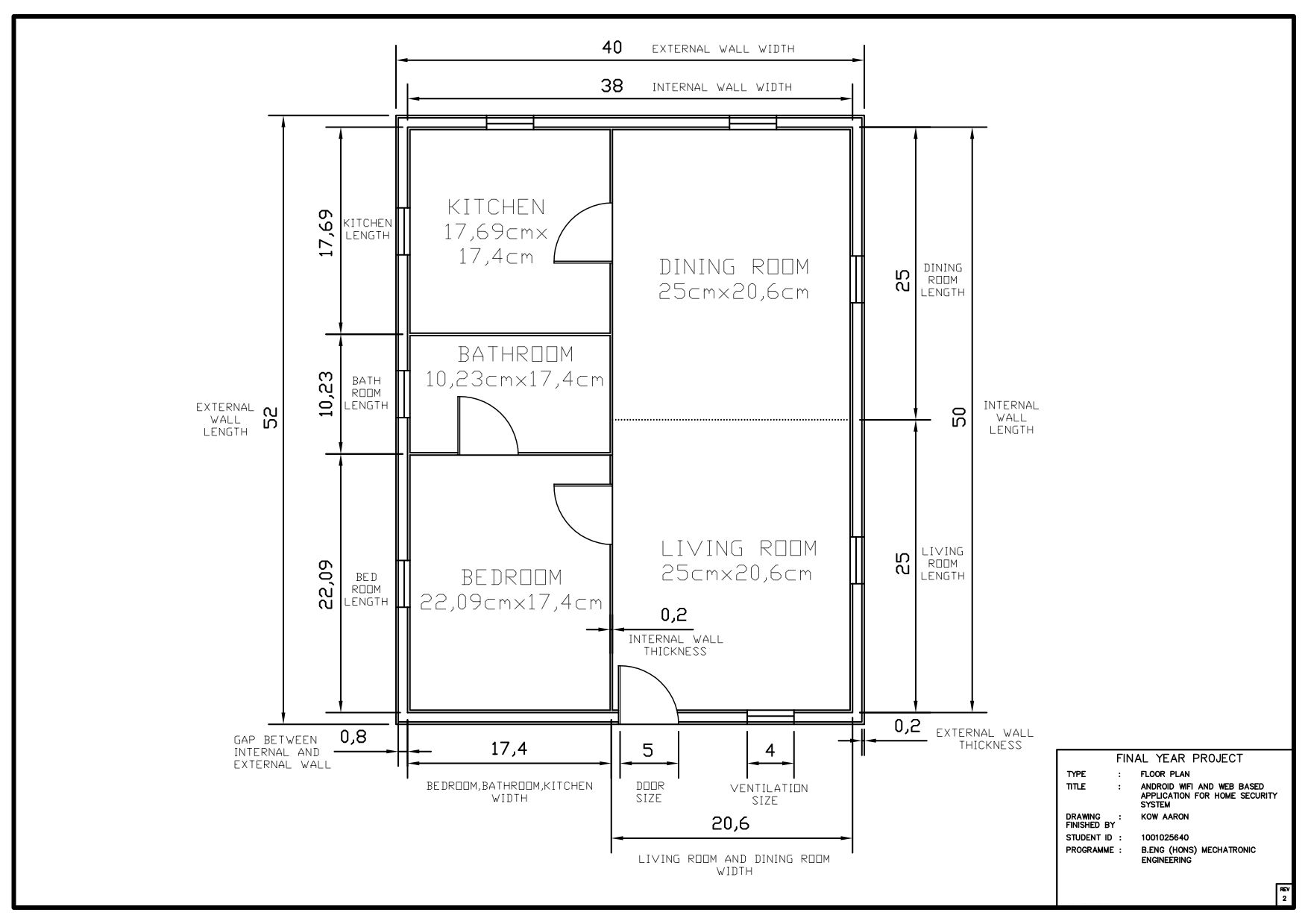
The structure of this model is build according to the floor plan layout as shown in schematics section. The materials that used are plywood with size 64.5cm (L) x 61.5cm (W) x 0.8cm (H) as the ground, craft plywood sheets for building the walls and main electronic components consist of 6 sensors, 1 NFC Reader and 2 microcontrollers, other minor components can refer to my components list.
Structure Model of this project
Thus, the finishing product is almost 85% covered by plywood materials. Similar as building the real house with concrete, the concept of building this house is entirely depend on the strong adhesive class of reactive prepolymers and polymers that known as polyepoxides or epoxy.
System Design for this Model
The design of this system is very straight-forward, which works in a two-way flow. First flow started from the data provided by the sensors through mircocontroller and to the cloud through the internet and retrieved by any smart devices. Second flow is the response flow from user to the microcontroller installed at home through internet connection and to the responding mechanisms ( LED on/off, servo-motor, water pump, so on... ) to react. Just like the IoT layer model, I designed my own a simple layer of hierarchy for this home model.
1 / 2 • System Design for this project
Custom Real-Time Monitoring IoT Web-Service
The IoT web-service is custom made by myself. The features of this web-service includes real-time capability to fetch and monitoring sensors data, dashboard for home status, system warning message, storage for sensors data, full data logging and safety benchmark configuration. I'm not fully open-source the code yet, but will do it in the coming future, mark my words. (At the time of this writing, there's still a lot of flaw about the web-service I wrote). But disappoint not, because I do find out there are some of other IoT web-services out there like Samsung's SAMI and Freeboard.io (probably more out there, but currently, I only knew these). I would like to share more details with picture about the service I wrote:
Picture 1: Connected Dashboard with Home Model
Picture 2: Safety Benchmark Configuration
Picture 3: Data Logging Graph
Picture 4: Example of 10 minutes Data Graph
Picture 5: Example of Full Data Logging
Picture 6: Example of System Warning Message
Picture 7: Example of Security is turned OFF using NFC
Picture 8: Example of Current Spike Condition
Picture 9: Vibration Sensor in Real-Time
Picture 10: Water Sensor in Real-Time
Picture 11: Gas Sensor in Real-Time
Picture 12: Temperature Sensor in Real-Time
Picture 13: Humidity Sensor in Real-Time
Picture 14: NFC Reader Data in Real-Time
1 / 14 • Connected Dashboard with Home Model
*For higher resolution of these pictures, you can view it in my Dropbox, here.
Building Process:a - Planning and Designing the House Plan
Before the house plan is being drawn, the original draft of the house plan is based on the arrangement of the sensors and furniture that being setup at the first place. The initiative involved the measurement and scaling of the arrangement for the furniture being recorded and taken account for the next proceeding step for designing the house plan. The actual presentation of the arrangement for the furniture is shown in picture below. On the left side of the figure is the breadboard with the configuration of the microcontroller and the power distribution.
Concept arrangement of sensors and furniture with purpose for drafting the house plan
b - Preparing the Construction Materials
The materials involved here is by meant of custom preparation for the house model. The materials preparation involved of plywood doors crafting, windows crafting and framework of the walls. The tasks of these preparation are shown below.
1 / 3 • Designing the window for wall framework
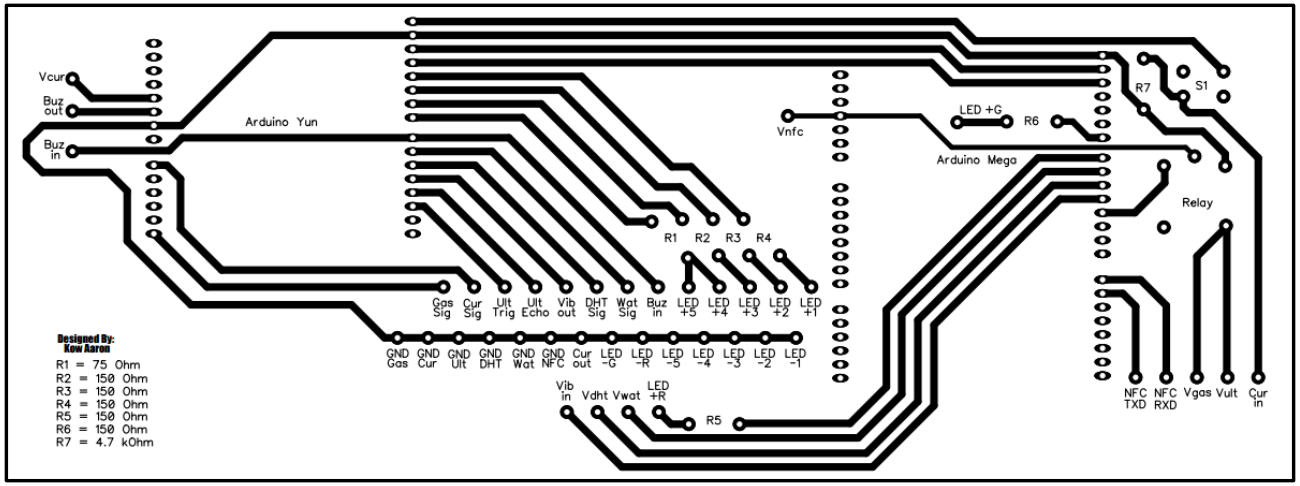
Another preparation is the circuit board for the system. I have made my own circuit board using positive acting presensitized printed circuit board. The method is very straight-forward and you can follow the full tutorial here. My printed circuit board can be seen below.
1 / 2 •
Printed circuit board for this system
c - Prepare the Site and Foundation
This phase, the term "site" here means for the field or ground that lay before the foundation. The ground that refer here is made from the plywood with dimensions of 64.5cm (L) x 61.5cm (W) x 0.8cm (H).
While for the foundation of the house is built from the combination of 4 pieces of craft plywood sheets that having the area of 52cm (L) x 40cm (W). With this foundation where the wall framework will be built upon in the next coming phase. The preparation of the site and foundation is shown in picture below.
Laying the foundation plywood upon the ground plywood
d - Complete the Rough Framing
This phase is very essential for the overall structure of the house because it deals with the collectively known shell or skeleton of the house which is the floor systems and walls systems. For both of these systems will be completed in this phase. Similar as the concept of building a real house, the floors and walls are cemented properly to hold firmly between the properties and protect against external force exerted on it. In this project house model, the floors and walls are finished using a strong adhesive solution known as epoxy. The finished floor systems and walls system is shown in picture below.
Finished floor system and walls system
e - Wiring Process and Connectivity Check
In this phase, all the sensors and NFC module are being installed in the planned position. Then, the wiring process able to be proceed. In the meantime, during the wiring process, the connectivity of the circuit is tested from time to time to prevent any wiring misplaced to improper connection.
1 / 2 • My attempt: untidy and messy connection for connectivity check to ensure functional with sensors
During the wiring process, there are total number up to 38 pin points that required to be completed in this task. For all the connection cables are properly categorized with accordance to the walls system which contains 4 segments that known as wall 1-cables, wall 2-cables, wall 3-cables and wall 4-cables ( all total of four main walls ). Lastly, these cables are framed to the walls within the house with strong adhesive epoxy. The examples of wiring works are shown below.
1 / 3 •
Wiring example for the LEDs
f - Complete the Internal Wall Framework
Only after all the previous phases completed, the internal wall of the framework is able to be built. Internal wall of this house is based on the house plan designed in step(a) and the completed work is shown below.
1 / 2 •
Building the internal wall framework
g - Move in all the Furniture!
Finally, the wall framework is completed, then the furniture can be brought in. To make it stable and unmovable, I used strong adhesive solution, eproxy to stick those furnitures on top of the foundation.
1 / 2 • Completed IoT Home Security Model
Project works with AWS IoT
I've decided to use this project to works using AWS IoT. Instead of using "HTTP" in as the original protocol, I've modified the data communication protocol using MQTT with secure connection from AWS IoT. And the result working very well, let me show the video demonstration below:
Video Demonstration with AWS IoT
The great about AWS IoT model is its emphasis on security in the cloud and cover strong authentication, for each of IoT device to be connected require credentials (X.509 certificate and AWS credential) to access the message broker. TLS is used to encrypts the connection between the device and the broker and this create an end-to-end secure communication.
[UPDATED]: Source code is available in my GitHub Repo, here
Although it is great about using this communication protocol compared to "HTTP", but there is a drawback when using this approach in this project. My original source code for Arduino Yun seems not working well with Yun-Sdk from AWS IoT, the "HTTP" LED controlling becomes obsolete. I think I will open this issue soon and takes some time to solve this issue. Overall, all sensors data working fine.
But overall, the data message works pretty well, and compared to my original "HTTP" approach, I will definitely go for "MQTT" with AWS IoT. Not only because of security, "MQTT" provide benefits such as low power usage, minimised data packets, and efficient distribution of information.
Important remarks in the source code:
/*
Example of Publishing a Topic in AWS IoT Home Security Model
(Code can be found in IoTHome-Yun.ino)
*/
char userid[] = "your-user-id-here"; // line 57
setTopic("IoTHome/nfc/"); // line 377
aws_iot.data(arrayTopic, value0); // line 378
void setTopic(char* topic){ // line 383
*arrayTopic = 0; // line 384
strcat(arrayTopic, topic); // line 385
strcat(arrayTopic, userid); // line 386
} // line 387
/*
Example of Output Topic (Code can be found in iot_config.cpp)
*/
Serial.print(topic); // line 106
// will output "IoTHome/nfc/your-user-id-here"
// userid is used for authentication in Web App
The coding for this project is open-source, please refer to the Code Section for my Github repo with name "AWS-IoT-Home-Security-Model-HW".
Future Improvement
Home Security System is one of the significant parts for the building blocks for a smart home. Thus, my consideration is to include as many sensors as possible and make good use of the data collected are the keys to making the home more “smarter”, in my opinion, collectively will linked to the improvement of security for a house.
Problems | Questions | Comments | Suggestion
Probably, there is some technical problem in this project that I'm not aware of, you can leave a comment or private message me, your feedback is highly valued!
Any questions regarding this project also can contact me.
All sorts of comments and suggestions are welcome.
Arduino Yun Source Code for IoT Home Security Model.
/* THIS SOURCE CODE ORIGINALLY INTENDED FOR USE IN UCSI UNIVERSITY ENGINEERING FINAL YEAR PURPOSES ONLY, NOW IS FULLY OPEN-SOURCE UNDER MIT LICENSE The MIT License (MIT) Copyright (c) 2015 AaronKow Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.*//*External library for temp + humid sensor (DHT22)*/#include<DHT.h>/*External library for Cloud Data*/#include<Process.h>/*External library enables communication between Arduino and OpenWrt-Yun*/#include<Bridge.h>/*External library for initiate the YunServer*/#include<YunServer.h>/*External library for managing the connection*/#include<YunClient.h>YunServerserver;//enabling the the Yun to listen for connected clients/*Current Sensor Configuration*/constintnumReadings=5;floatreadings[numReadings];intindex=0;floattotal=0;floataverage=0;floatcurrentValue=0;floatinitVal=0;/*Ultrasonic Sensor Configuration*/constinttrigPin=2;constintechoPin=3;longduration,cm;/*Gas Sensor Configuration*/intgasValue;/*TempHumid Sensor Configuration*/constinttempPin=5;floatt,h;//variables for temperature sensorDHTdht(tempPin);//define temperature sensor configuration/*Cloud Data Configuration*/Stringvalue0,value1,value2,value3,value4,value5,value6,value7;// For sensors valuesStringled1,led2,led3,led4;// For LED valuesStringipAddress="192.168.0.105:3000";// set your ip address hereStringuserid="your-user-id-here";// set your user id herevoidsetup(){/*Http Client Setup*/pinMode(8,OUTPUT);// Living Room LightspinMode(9,OUTPUT);// Bedroom LightpinMode(10,OUTPUT);// Bathroom LightpinMode(11,OUTPUT);// Kitchen Light/*Current Sensor Setup*/pinMode(0,INPUT);pinMode(13,OUTPUT);// for transmit data to Megafor(intthisReading=0;thisReading<numReadings;thisReading++){readings[thisReading]=0;}/*Ultrasonic Sensor Setup*/pinMode(trigPin,OUTPUT);pinMode(echoPin,INPUT);/*Vibration Sensor Setup*/pinMode(A2,INPUT);pinMode(A3,OUTPUT);/*Water Sensor Setup*/pinMode(6,INPUT);/*Buzzer Pin Setup*/pinMode(7,OUTPUT);/*Initiate Setup*/Serial.begin(115200);//Set serial baud rate to 115200 bpsBridge.begin();// Initialize the Bridge communicationserver.begin();// enabling Yun to listen for connected clientsserver.noListenOnLocalhost();// tells the server to begin listening for incoming connections }voidloop(){/*http action*/YunClientclient=server.accept();if(client.connected()){Serial.println("CLIENT CONNECTED!");process(client);// Process requestclient.stop();// Close connection and free resources}clearCloudData();systemStatus();currentSensor();ultrasonicSensor();gasSensor();vibrationSensor();TempHumidSensor();waterSensor();cloudData();//delay(500);}voidprocess(YunClientclient){Stringcommand=client.readStringUntil('/');// read the commandif(command=="digital"){// verify if command for digitaldigitalCommand(client);}}voiddigitalCommand(YunClientclient){intpin,value;pin=client.parseInt();// Read pin number// If the next character is a '/' it means an URL preceivedif(client.read()=='/'){value=client.parseInt();// taking value from clientdigitalWrite(pin,value);// proceed to changes on the selected pin}else{value=digitalRead(pin);// read value if no changes made}// Send feedback to clientclient.print(F("Pin D"));client.print(pin);client.print(F(" set to "));client.println(value);Serial.println(value);// Update datastore key with the current pin valueStringkey="D";key+=pin;Bridge.put(key,String(value));}voidclearCloudData(void){value0=value1=value2=value3=value4=value5=value6=value7="";}voidsystemStatus(void){if(digitalRead(12)==1){value0+=1;}else{value0+=0;}}voidcurrentSensor(){total=total-readings[index];if(digitalRead(12)==1){readings[index]=analogRead(0);readings[index]=(readings[index]-512)*5/1024/0.04+2.85;// calibrate your own current sensor heretotal=total+readings[index];index=index+1;if(index>=numReadings)index=0;average=total/numReadings;currentValue=average;if(currentValue<0){currentValue=0.51;// this to ensure current stay at 0.51A if current drop below 0A}value1+=currentValue;}else{currentValue=0;value1+=0;}Serial.println(currentValue);if(currentValue>1){//TO BE ADJUSTdigitalWrite(13,HIGH);buzzer(true);cloudData();}else{digitalWrite(13,LOW);buzzer(false);}delay(20);}voidultrasonicSensor(){//require to adjustdigitalWrite(trigPin,LOW);delayMicroseconds(2);digitalWrite(trigPin,HIGH);delayMicroseconds(10);digitalWrite(trigPin,LOW);duration=pulseIn(echoPin,HIGH);cm=(duration/29/2)+3;// to centimetresif(cm<20){//eliminate data fluctuationbuzzer(true);delay(500);}else{buzzer(false);}Serial.print(cm);Serial.println(" cm");value2+=cm;delay(20);}voidgasSensor(){gasValue=(analogRead(5)*0.01);//Read Gas value from analog 0Serial.println(gasValue,DEC);//Print the value to serial portvalue3+=(gasValue);if(gasValue<6){if(gasValue==0){buzzer(false);}else{buzzer(true);}}else{buzzer(false);}delay(20);}voidvibrationSensor(){if(digitalRead(12)==1){digitalWrite(A3,!digitalRead(A2));if(digitalRead(A2)!=digitalRead(A3)){buzzer(true);delay(500);Serial.println("Vibrated!");//1value4+=1;}else{buzzer(false);Serial.println("No Vibration...");//0value4+=0;}}else{//Serial.println("No Signal!");buzzer(false);value4+=0;}}voidTempHumidSensor(){// Wait a few seconds between measurements.delay(20);//2000 = 2 seconds// Reading temperature or humidity takes about 250 milliseconds!// Sensor readings may also be up to 2 seconds 'old' (its a very slow sensor)h=dht.readHumidity();// Read temperature as Celsiust=dht.readTemperature();Serial.print("Humidity: ");Serial.print(h);Serial.print(" %\t");Serial.print("Temperature: ");Serial.print(t);Serial.print(" *C ");Serial.print("\n");value5+=t;value6+=h;}voidwaterSensor(){if(digitalRead(12)==HIGH){if(digitalRead(6)==LOW){buzzer(true);Serial.println("Water Status Warning!");//1value7+=0;}else{buzzer(false);Serial.println("Water Status OK");//0value7+=1;}delay(20);}else{//Serial.println("No Signal");value7+=1;}}voidbuzzer(booleansound){if(digitalRead(12)==1){//1 means security system is onlineif(sound){digitalWrite(7,HIGH);delay(100);}else{digitalWrite(7,LOW);}}else{//disable any buzzer if system offlinedigitalWrite(7,LOW);}}voidcloudData(void){if(value0=="0"){value0="0";value1=value2=value3=value4=value5=value6=value7="";}led1=digitalRead(8);led2=digitalRead(9);led3=digitalRead(10);led4=digitalRead(11);Processp;p.runShellCommand("curl \"http://"+ipAddress+"/ledstatus?userid="+userid+"&led1state="+led1+"&led2state="+led2+"&led3state="+led3+"&led4state="+led4+"\" -k");p.runShellCommand("curl \"http://"+ipAddress+"/sensordata?userid="+userid+"&ultrasonic="+value2+"¤t="+value1+"&vibration="+value4+"&water="+value7+"&gas="+value3+"&temp="+value5+"&humid="+value6+"&nfc="+value0+"\" -k");while(p.running());//delay(100);}
IoTHome-Mega
Arduino
Arduino Mega 2560 Source Code for IoT Home Security Model.
/* THIS SOURCE CODE ORIGINALLY INTENDED FOR USE IN UCSI UNIVERSITY ENGINEERING FINAL YEAR PURPOSES ONLY, NOW IS FULLY OPEN-SOURCE UNDER MIT LICENSE The MIT License (MIT) Copyright (c) 2015 AaronKow Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.*///pin 3 to control relay power for Ultrasonic and gas sensor//pin 4 to power vibration sensor//pin 5 to power Temp + Humid sensor//pin 6 to power Water sensor//pin 7 to show NFC-System Status Red Light//pin 8 to show NFC-System Status Green Light//pin 12 to notify Yun about System Status//pin 13 to receive current status from Yun/* NFC Configuration source code from dfRobot Wiki, link: http://goo.gl/qfvi4e */constunsignedcharwake[16]={0x55,0x55,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};//wake up NFC moduleconstunsignedcharfirmware[9]={0x00,0x00,0xFF,0x02,0xFE,0xD4,0x02,0x2A,0x00};constunsignedchartag[11]={0x00,0x00,0xFF,0x04,0xFC,0xD4,0x4A,0x01,0x00,0xE1,0x00};//detecting tag commandconstunsignedcharstd_ACK[25]={0x00,0x00,0xFF,0x00,0xFF,0x00,0x00,0x00,0xFF,0x0C,0xF4,0xD5,0x4B,0x01,0x01,0x00,0x04,0x08,0x04,0x00,0x00,0x00,0x00,0x4b,0x00};unsignedcharold_id[5];constunsignedcharsamConfig[10]={0x00,0x00,0xFF,0x03,0xFD,0xD4,0x14,0x01,0x17,0x00};constunsignedcharmyCard[25]={/* Set your NFC here */// Example of my phone NFC below:// My phone NFC: 0 0 FF 0 FF 0 0 0 FF 11 EF D5 4B 1 1 0 4 25 91 5 4 3 2 1 79 0x00,0x00,0xFF,0x00,0xFF,0x00,0x00,0x00,0xFF,0x11,0xEF,0xD5,0x4B,0x01,0x01,0x00,0x04,0x25,0x91,0x05,0x04,0x03,0x02,0x01,0x79};unsignedcharreceive_ACK[25];//Command receiving buffer//int inByte = 0; //incoming serial byte buffer/*External include for NFC*/#if defined(ARDUINO) && ARDUINO >= 100#include"Arduino.h"#define print1Byte(args) Serial3.write(args)#define print1lnByte(args) Serial3.write(args),Serial3.println()#else#include"WProgram.h"#define print1Byte(args) Serial3.print(args,BYTE)#define print1lnByte(args) Serial3.println(args,BYTE)#endifvoidsetup(){/*NFC Setup*/Serial3.begin(115200);//open Serial3 with device//while (!Serial);wake_card();SAMConfig();delay(100);read_ACK(15);delay(100);display(15);Serial.println("Read Firmware");firmware_version();delay(100);read_ACK(19);delay(100);display(19);/*Data Transmission to Yun Setup*/pinMode(12,OUTPUT);//Tell Yun where system Logged in or outdigitalWrite(12,HIGH);/*System Status Setup*/pinMode(7,OUTPUT);pinMode(8,OUTPUT);digitalWrite(7,LOW);digitalWrite(8,HIGH);/*General Setup*/pinMode(3,OUTPUT);pinMode(4,OUTPUT);pinMode(5,OUTPUT);pinMode(6,OUTPUT);pinMode(13,INPUT);digitalWrite(3,LOW);//to control relaydigitalWrite(4,HIGH);digitalWrite(5,HIGH);digitalWrite(6,HIGH);Serial.begin(115200);// open serial with PC}voidloop(){//Serial.println(digitalRead(13));checkStatus();nfc();}voidnfc(){send_tag();delay(100);read_ACK(25);delay(100);Serial.println("Display Tag:");display(25);checkID();delay(200);//delay(2500);//copy_id ();}voidcheckID(void){intj;for(j=0;j<25;j++){if(receive_ACK[j]==myCard[j]){//proceed for validation}else{Serial.println("Scanning for Card...");break;}}if(j==25){Serial.println("Card Recognized!");digitalWrite(12,!digitalRead(12));digitalWrite(7,!digitalRead(7));digitalWrite(8,!digitalRead(8));if(digitalRead(12)==HIGH){Serial.println("System Online");//Security system offline}else{Serial.println("System Offline");}}}/*void copy_id (void) {//save old id int ai, oi; for (oi=0, ai=19; oi<5; oi++,ai++) { old_id[oi] = receive_ACK[ai]; }}*/charcmp_id(void){//return true if find id is oldintai,oi;for(oi=0,ai=19;oi<5;oi++,ai++){if(old_id[oi]!=receive_ACK[ai])return0;}return1;}inttest_ACK(void){// return true if receive_ACK accord with std_ACKinti;for(i=0;i<19;i++){if(receive_ACK[i]!=std_ACK[i])return0;}return1;}voidsend_id(void){//send id to PCinti;Serial.print("ID: ");for(i=19;i<=23;i++){Serial.print(receive_ACK[i],HEX);Serial.print(" ");}Serial.println();}voidUART1_Send_Byte(unsignedcharcommand_data){//send byte to deviceprint1Byte(command_data);#if defined(ARDUINO) && ARDUINO >= 100Serial3.flush();// complete the transmission of outgoing serial data #endif}voidUART_Send_Byte(unsignedcharcommand_data){//send byte to PCSerial.print(command_data,HEX);Serial.print(" ");}voidread_ACK(unsignedchartemp){//read ACK into reveive_ACK[]unsignedchari;for(i=0;i<temp;i++){receive_ACK[i]=Serial3.read();}}voidwake_card(void){//send wake[] to deviceunsignedchari;for(i=0;i<16;i++){//send commandUART1_Send_Byte(wake[i]);//Serial.print(wake[i], HEX);}}voidfirmware_version(void){//send fireware[] to deviceunsignedchari;for(i=0;i<9;i++)//send commandUART1_Send_Byte(firmware[i]);}voidsend_tag(void){//send tag[] to deviceunsignedchari;for(i=0;i<11;i++)//send commandUART1_Send_Byte(tag[i]);}voiddisplay(unsignedchartem){//send receive_ACK[] to PCunsignedchari;for(i=0;i<tem;i++)//send commandUART_Send_Byte(receive_ACK[i]);Serial.println();}voidSAMConfig(void){unsignedchari;for(i=0;i<10;i++){//send commandUART1_Send_Byte(samConfig[i]);}}voidcheckStatus(void){if(digitalRead(12)==0){//system offlinedigitalWrite(3,HIGH);digitalWrite(4,LOW);digitalWrite(5,LOW);digitalWrite(6,LOW);}else{//system onlineif(digitalRead(13)==1){//check current statusdigitalWrite(3,HIGH);digitalWrite(4,LOW);digitalWrite(5,LOW);digitalWrite(6,LOW);}else{//system back onlinedigitalWrite(3,LOW);digitalWrite(4,HIGH);digitalWrite(5,HIGH);digitalWrite(6,HIGH);}}}
Modified DHT.cpp
C/C++
Modified DHT.cpp for IoT Home Security Model
/* DHT library MIT license written by Adafruit Industries Modified by Aaron Kow for IoT Home Security Model*/#include"DHT.h"DHT::DHT(uint8_tpin,uint8_tcount){_pin=pin;_count=count;firstreading=true;}voidDHT::begin(void){// set up the pins!pinMode(_pin,INPUT);digitalWrite(_pin,HIGH);_lastreadtime=0;}//boolean S == Scale. True == Farenheit; False == CelciusfloatDHT::readTemperature(void){floatf;if(read()){f=data[2]&0x7F;f*=256;f+=data[3];//>>>>>>>> improvement required<<<<<<<<f/=10;if(data[2]&0x80){//negative-checker, if the and equate to 1 is truef*=-1;}returnf;}else{returnNAN;}}floatDHT::readHumidity(void){floatf;if(read()){f=data[0];f*=256;f+=data[1];//>>>>>>>> improvement required<<<<<<<<f/=10;returnf;}else{returnNAN;}}booleanDHT::read(void){uint8_tlaststate=HIGH;uint8_tcounter=0;uint8_tj=0,i;unsignedlongcurrenttime;// Check if sensor was read less than two seconds ago and return early// to use last reading.currenttime=millis();if(currenttime<_lastreadtime){//reset the last read time_lastreadtime=0;}if(!firstreading&&((currenttime-_lastreadtime)<2000)){returntrue;// return last correct measurement//delay(2000 - (currenttime - _lastreadtime));}firstreading=false;/* Serial.print("Currtime: "); Serial.print(currenttime); Serial.print(" Lasttime: "); Serial.print(_lastreadtime); */_lastreadtime=millis();data[0]=data[1]=data[2]=data[3]=data[4]=0;//clear data// pull the pin high and wait 250 millisecondsdigitalWrite(_pin,HIGH);//original delay(250);// now pull it low for ~20 millisecondspinMode(_pin,OUTPUT);digitalWrite(_pin,LOW);delay(20);noInterrupts();//disable interrupt for time-sensitive codedigitalWrite(_pin,HIGH);delayMicroseconds(40);pinMode(_pin,INPUT);// read in timingsfor(i=0;i<MAXTIMINGS;i++){//MAXTIMINGS = 85counter=0;/*calibrated:response to the sensor, break once pin turns high.*/while(digitalRead(_pin)==laststate){//intially laststate = highcounter++;delayMicroseconds(1);if(counter==255){//255 is the maximum timeoutbreak;}}laststate=digitalRead(_pin);if(counter==255)break;//if timeout, break directly/* Condition 1: ignore first 3 transitions Condition 2: accept only figure divide by 2 */if((i>=4)&&(i%2==0)){// shove each bit into the storage bytesdata[j/8]<<=1;//divide by eight to ensure whole number, 0-4if(counter>_count)//_count here represent 60usdata[j/8]|=1;j++;}}interrupts();// check we read 40 bits and that the checksum matchesif((j>=40)&&(data[4]==((data[0]+data[1]+data[2]+data[3])&0xFF))){returntrue;}else{returnfalse;}}
Modified DHT.h
C/C++
Modified DHT.h for IoT Home Security Model
/* DHT library MIT license written by Adafruit Industries Modified by Aaron Kow for IoT Home Security Model*/#ifndef DHT_H#define DHT_H#if ARDUINO >= 100#include"Arduino.h"#else#include"WProgram.h"#endif#define MAXTIMINGS 85classDHT{private:uint8_tdata[6];uint8_t_pin,_count;unsignedlong_lastreadtime;booleanfirstreading;public:DHT(uint8_tpin,uint8_tcount=6);voidbegin(void);floatreadTemperature(void);floatreadHumidity(void);booleanread(void);};#endif
IoT-Home-Security-Model-HW
Source code repository for IoT Home Security Model Harewares
AWS-IoT-Home-Security-Model-HW
Source code repository for AWS IoT Home Security Model Hardwares





_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments