This project involves the development of a smart white cane designed to assist visually impaired individuals in navigating their surroundings. The system is built around the ATtiny85 microcontroller, which serves as the brain of the device. The cane is equipped with an ultrasonic sensor that detects obstacles in the user's path by emitting ultrasonic waves and measuring the time it takes for the waves to bounce back from objects. This project was tested with 52 visually impaired individuals, and constructive feedback was gathered to improve the product's accuracy and efficiency.
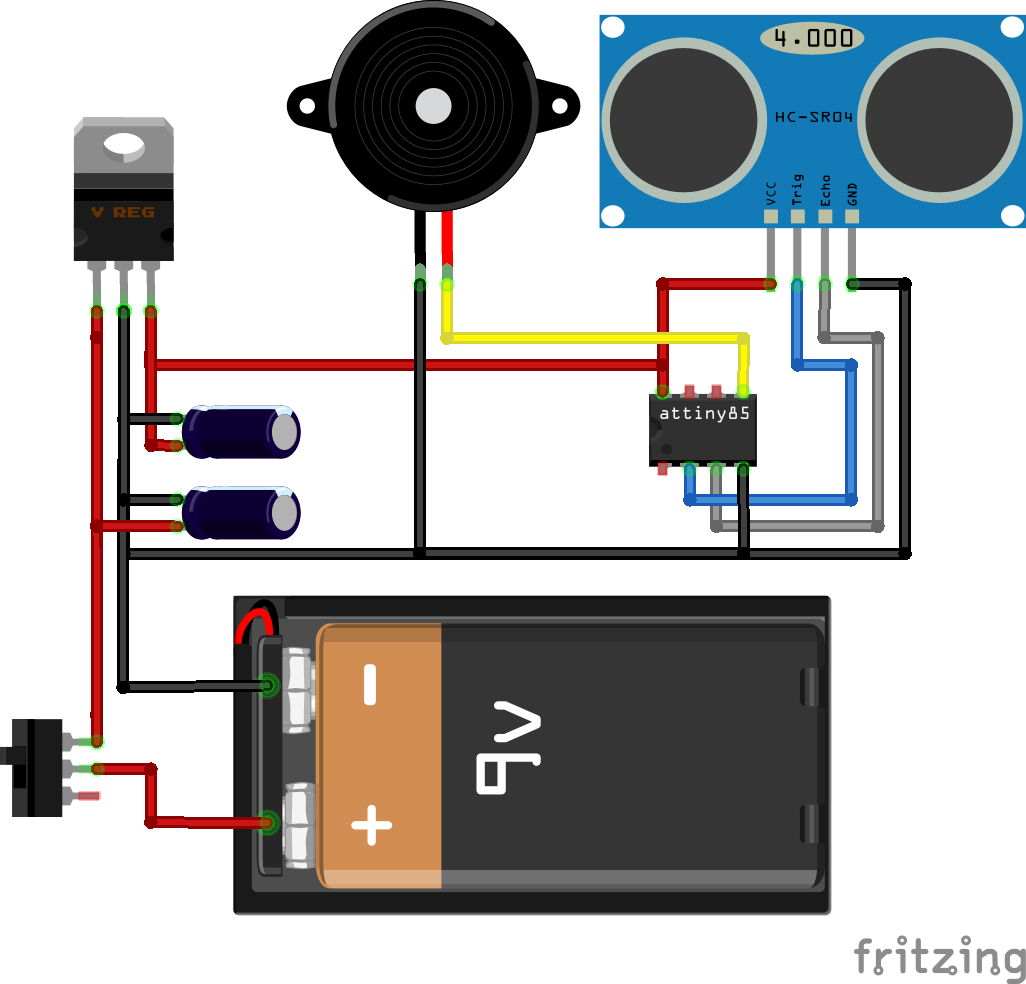
Key Components:- ATtiny85 Microcontroller: A compact and energy-efficient microcontroller that controls the operation of the ultrasonic sensor and buzzer.
- Ultrasonic Sensor: Mounted on the cane, this sensor continuously measures the distance to nearby objects. It can detect obstacles within a specified range (e.g., up to 4 meters).
- Buzzer: The buzzer provides auditory feedback to the user. When an obstacle is detected within a certain distance (e.g., 1 meter), the buzzer emits a sound that increases in frequency as the user gets closer to the obstacle.
- 3D Printed Design: A 3D-printed case can securely hold the components of your smart cane project, like the ATtiny85, ultrasonic sensor, and buzzer. The case is designed to attach easily to a standard white cane, making it compact, durable, and convenient for daily use.
The project can be implemented in two ways, depending on your resources and experience:
Using a Ready-Made ATtiny85 Board with USB:- Ease of Use: This option is more straightforward, especially for beginners. The ready-made ATtiny85 board with a built-in USB port allows you to program the microcontroller directly from your computer without needing additional hardware.
- Features: These boards typically come with built-in components like voltage regulators and sometimes even a built-in LED or other useful features, making the project more straightforward.
- Programming: You can program the ATtiny85 directly using the Arduino IDE with a USB cable, eliminating the need for external programmers or complex wiring.
Advantages:
- Quick and easy setup.
- There is no need for extra components like a voltage regulator or external programmer.
- Suitable for rapid prototyping.
Creating Your Custom Board:- Customization: This option allows you to create a custom PCB that includes the ATtiny85, a voltage regulator, and other components as needed. This more flexible method can result in a more compact and tailored design.
- Programming: You must program the ATtiny85 using an Arduino Uno (or another programmer) as an ISP (In-System Programmer). This involves connecting the Arduino Uno to the ATtiny85 and uploading the code via the Arduino IDE.
Steps:
- Design the PCB: You can design a custom PCB that includes the ATtiny85, a voltage regulator, and other necessary components.
- Assemble the Board: Once the PCB is ready, you can solder the components onto it.
Custom PCB - Assemble the Board
- Program the Chip: Use an Arduino Uno to program the ATtiny85. This involves connecting the Arduino Uno to the ATtiny85 and using the Arduino as a programmer.
Functionality:- Obstacle Detection: The ultrasonic sensor scans the area in front of the user, detecting obstacles within a predefined range. The ATtiny85 processes the sensor's data to determine the distance to the nearest object.
- Auditory Feedback: If an obstacle is detected within a critical range, the ATtiny85 activates the buzzer. The sound's frequency varies depending on the proximity of the obstacle, allowing the user to gauge the distance based on the pitch of the sound.
- Power Efficiency: The ATtiny85 is chosen for its low power consumption, ensuring that the device can operate for extended periods without frequent battery replacements.
Applications:The Smart White Cane is an affordable and practical solution for enhancing the mobility of visually impaired individuals. Providing real-time feedback about obstacles in the user's path increases their confidence and safety while navigating unfamiliar environments.
Project Benefits:
- Enhanced Mobility: Assists users in avoiding obstacles, reducing the risk of collisions and falls.
- Cost-Effective: Utilizes inexpensive components, making it accessible to a wide range of users.
- Simple Design: The project is designed to be easy to assemble and program, making it suitable for educational purposes and DIY enthusiasts.















{kind=link}
Comments