The story started in mid-2018, at the invitation of Riverland Wine, researchers from the University of Adelaide visited a range of Riverland vineyards and discussed with growers key pain points and future ambitions as they relate to digital viticulture. From these early meetings, a subsequent pilot project in early 2019 and continual engagement with growers both directly and through Riverland Wine as their representative body, a number of consistent messages emerged—messages that would form the basis of what has now become ‘VitiVisor’.
Researchers from the University of Adelaide at Riverland
VitiVisor Design Concepts
VitiVisor is a digital platform that integrates and builds on diverse data streams to generate value for winegrape growers. Its mission is to support winegrape growers to make decisions that will not only lower their cost of production but make important decisions based on 'what if' scenarios.
You can check out this 2021 interview with BBC News UK: Vineyards set to go high tech with smart systems - BBC News.
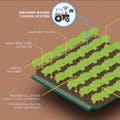
The ground-based vision system (GBVS) collects and analyses imagery from camera systems that can be mounted on any agricultural vehicle and can interpret these images through a set of sophisticated computer vision algorithms to generate insights for growers. The system was built as an end-to-end solution that involves image capture, processing, and presentation back to the grower, with the workflow illustrated in the image below, from left to right, the setup, the captured and processed images, and the extracted information display on dashboard. The system is designed as two separate sub-systems: the image collection device (VitiBox Cloud) and the post-processing sub-system.
Ground-based system workflow
Compared to competing systems, the VitiBox Cloud is designed to be a low cost and general use ground-based image capturing system which provide metadata including timestamp and geo-tag (accuracy in centimetres). It also offers the following benefits: flexible (i.e., to connect to additional cameras), high resolution (i.e. up to 3280x2463 pixels), low maintenance (i.e., battery charging), low operating cost, and low operational risk (i.e., no concern for safety).
Throughout the project, the VitiBox system has gone through a series of design cycles, summarised briefly below:
· VitiBox 1.0: It has a RGB camera and a long-wave infrared (LWIR) thermal camera for fixed location image capturing. the surface dripping irrigation system at Waite campus only. RGB and thermal Images are taken every 3 minutes. The resolutions for the RGB and thermal images are 640 x 480 and 160 x 120, respectively.
· VitiBox 2.x: Based on feedback from growers, a ground-based vision system that captures high-resolution, geo-located canopy images at a high frequency was designed and developed. Four versions were evolved from VitiBox 2.0 to VitiBox 2.3. The image resolution was eventually increased to 3280 x 2464. In addition, real-time timestamp in milliseconds and RTK GPS geo-tag in centimetres were added as part of the metadata. The VitiBox 2.x series were tested at Waite Campus of the University of Adelaide and Loxton Research Centre at Loxton.
· VitiBox Cloud: This is the final release for VitiVisor project. It inherits all upstanding features from the previous prototypes and integrates tightly with the other systems in VitiVisor. VitiBox Cloud uploads all RGB images, corresponding timestamps, and geo-tags automatically to the Cloud when it connects to the Internet. The post-processing sub-system starts the processing once an image is received and the extracted information will be displayed on the VitiVisor dashboard.
A summary of the VitiBox Cloud technical specifications are listed below:
Technical specifications of VitiBox Cloud










_nj0GceZPVI.png)



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
_vMipfInEWN.jpeg?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
_nj0GceZPVI.png){kind=link}
Comments