

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
INTRODUCTION
Controlling the home appliance and electronic gadgets through an infrared remote control is now general. But the same controlling task can be done more easily. Primary motive of purposing the new system of hand gesture remote control is to remove the need to look in to the hand held remote and to search for a specific key for specific function mainly for older ones. This project presents a novel system to control home appliance through hand gesture as a remote control device. The project will be referred to as flickremote in this report. It uses an ultrasonic rangefinder to determine the user's gesture and outputs an IR signal, Microcontroller Developer Board Arduino 101
HARDWARE COMPONENTS
1. An Arduino 101 or uno
2. An HC-SR04 ultrasonic module
3. An Infra-red LED
4. An appropriate resistor for your Infra-red LED (220R)
5. An RGB LED
6. A breadboard and wires
HOW IT WORKS :
This Project uses an ultrasonic rangefinder to determine the user's gesture and outputs an IR signal to a TV on the command given..The distance or inches can be edited in the code which matches your convenience
- High swipe (> 10in) = Channel Up
- Low swipe = Channel Down
- High hold (> 10in) = Volume Up
- Low hold = Volume Down
- Cover sensor (< 3in) = Turn On / Off
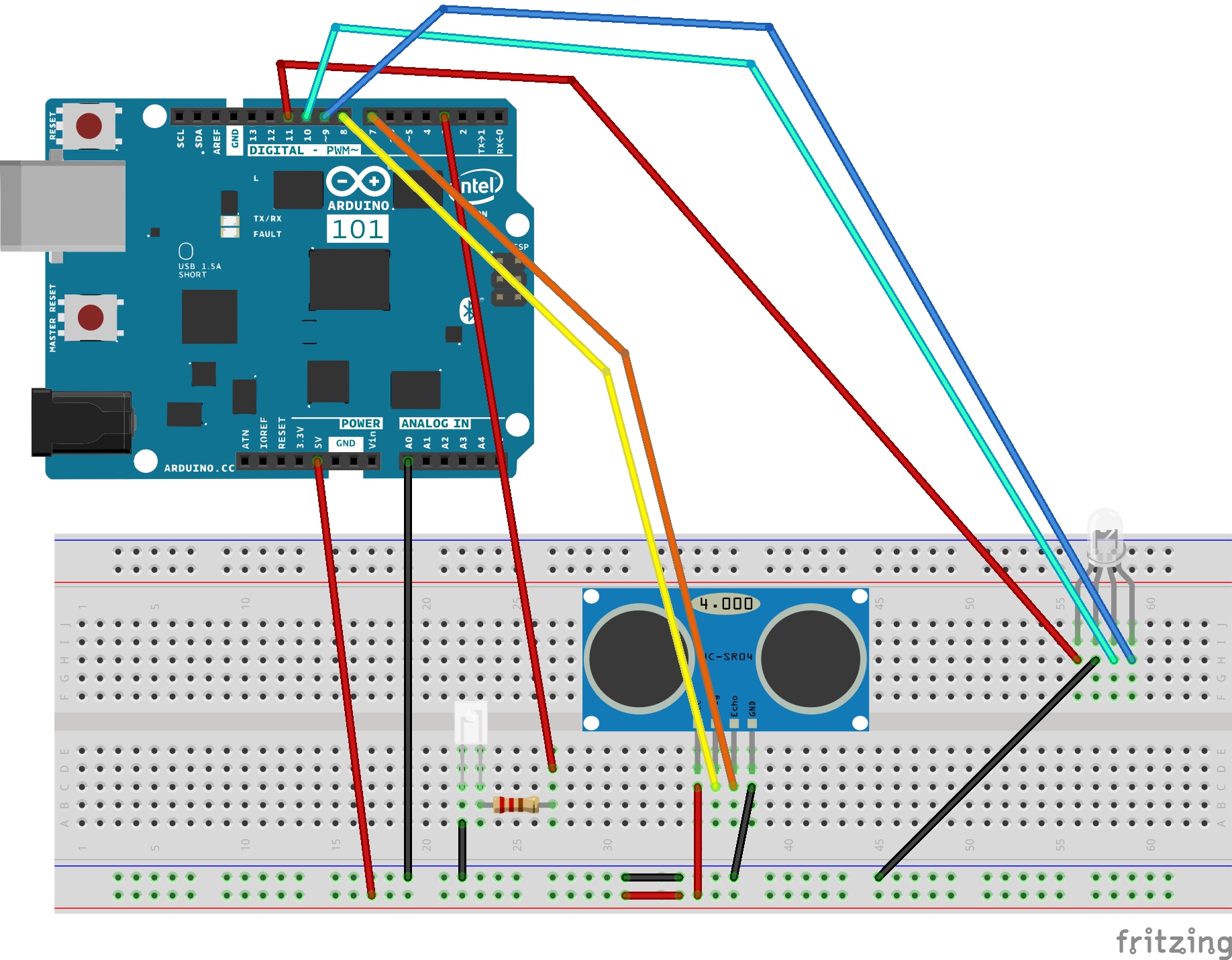
Circuit Diagram Using Fritzing :
CONSTRUCTION :
1. Connect the IR LED to pin 3 via an appropriate resistor, and then connect the cathode to GND.
2. Connect the ultrasonic sensor to 5v and GND where the pins specify. Connect the trigger pin to pin 8 and the echo pin to 7. You can configure these pins in the program
3. Connect the RGB LED to GND and pins 11 (red), 10 (green), 9 (blue). These pins are also configurable.
CONTROLS
Power
Swiping over the sensor within 3 inches will cause the LED to flash purple. This is the confirmation that a 'turn on / off' signal is ready to be sent. To prevent it accidentally turning the TV off I have made the sketch wait for a second swipe within 5 seconds of the first to confirm. At this point the signal is sent to the TV to turn on or off.
Channel
Swiping within 10 inches of the sensor (but not within 3) will cause the channel to change down. Swiping between 10 and 20 inches will cause the channel to change up.
Volume
Holding your hand within 10 inches of the sensor (but not within 3) will cause the volume to change down. Holding between 10 and 20 inches will cause the volume to change up. The volume will continue to change (up or down) until your hand is removed
ADVANTAGES AND IMPROVEMENT :
Will Remove the need to look in to the hand held remote and to search for a specific key for specific function
A Solution to control the gadget (TV) for blinds and physically challenged persons
The Project can be improved by adding more functionality to control all home appliance using same method
THANK YOU




{kind=link}
Comments