#include <PubSubClient.h>
#include <Network.h>
#include <Timer.h>
#include <SPI.h>
#include <Ethernet.h>
#include <Dns.h>
#include <avr/wdt.h>
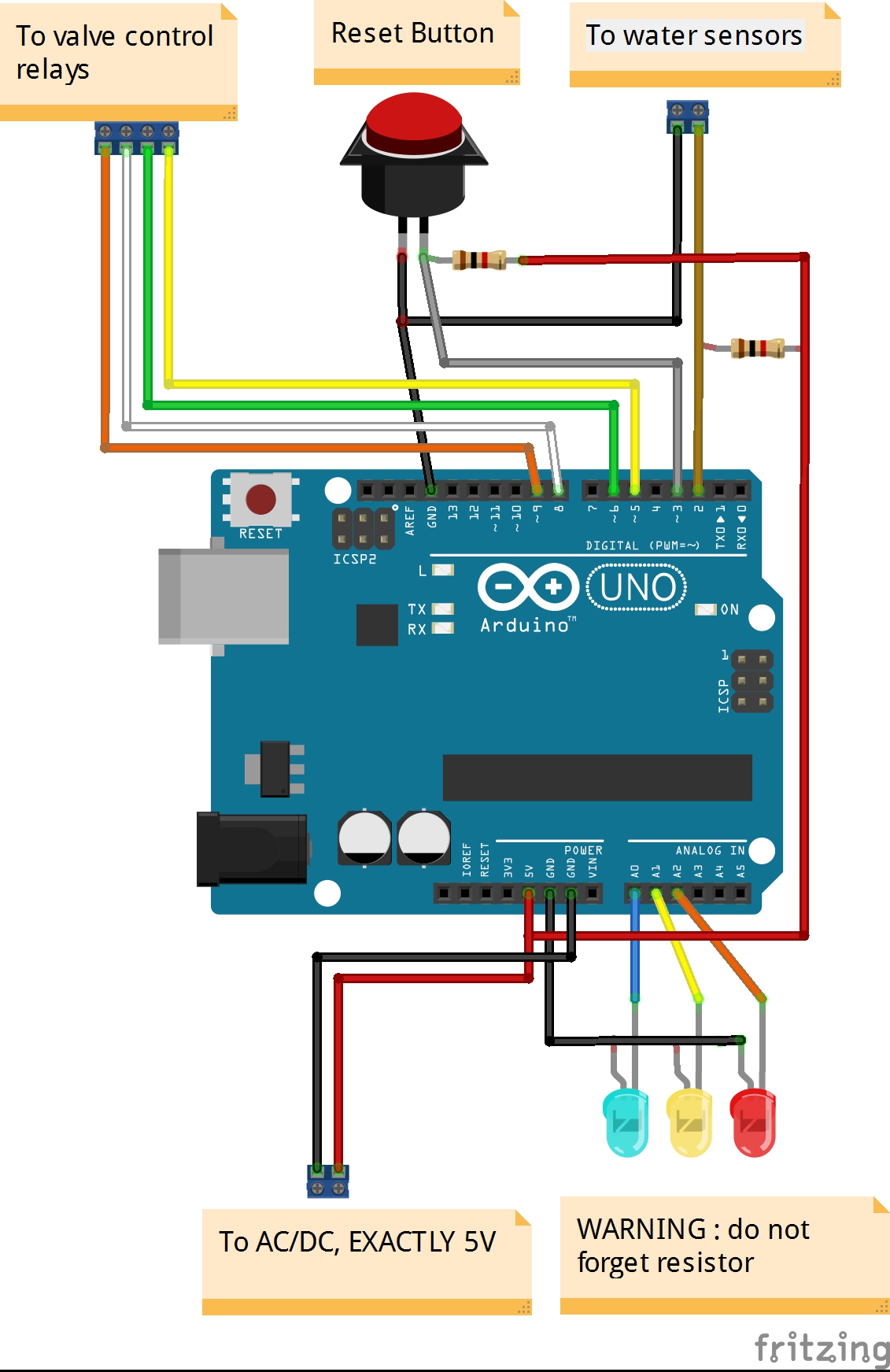
/* Here is how the HW works
Therea are three subsystems:
- the main box :
- an Arduino Uno with and Ethernet shield
- a red LED : steady when water is detected localy
blinking when water is detected remotely ,
off otherwise
- a yellow LED : steady when valve is out of order,
blinking when MQTT broker is unreachable (for any reason),
off otherwise
- a blue LED : steady when valve is open and system is monitoring leakages,
blinking when valve has been turned off
off is system is down
- a push button : once pressed, a self-test is triggered
- a dual relay to control a remote motorized valve
- another dual relay to sense the open/close limit switches installed on the remote valve
- a set of water detectors (all in parrallel) (all 3 connectors on the fron panel are connected in parralel)
The motorized valve has the following connections:
- Yellow and Blue : DC to power the motor
- Black : limit switches input (will be set to GND in our circuit)
- Red = will turn to GND when the valve hits its fully closed position (note: due to the internal design of the limit switch, there is no guarantee that continuity will remain once the valve if powerd off)
- Green = will turn to GND when the valve hits its fully open position (note: due to the internal design of the limit switch, there is no guarantee that continuity will remain once the valve if powerd off)
*/
// Network
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xCF, 0xFC, 0xEE }; // Arduino's MAC address
IPAddress ip(192, 168, 12, 215); // Arduino's IP address
IPAddress server(192, 168, 12, 130); // MQTT broker's address
EthernetClient ethClient;
// MQTT
PubSubClient client(ethClient);
#define mqttClientPrefix "GLX" // Prefix to use any MQTT publication/subscription
#define mqttClientLocation "BASEMENT" // Second part of the client identifier
#define mqttClientUID "001" // Last part of the client identifier
#define mqttClientStatusTopic "Status" // Topic to be used to publish device status
#define mqttClientFaultTopic "Fault" // Topic to be used to publish/subscribe to Faults
const int mqttInterval = 20; // determines how often the system will report to MQTT broker (ie. every mqttInterval * mainLoopDelay ms )
int mqttIntervalCnt = 0; // local variable used to count down
int isConnectedToBroker = -1; // 1 when connected, -1 = unknown, 0 = unable to connected
// Pin-out
const int SystemLedPin = A0; // Blue led
const int FaultLedPin = A1; // Yellow led
const int AlarmLedPin = A2; // Red led
const int WaterDetectorPin = 2; // goes to LOW when water is detected, otherwise pulled-up to VCC
const int ToggleButtonPin = 3; // goes to LOW when someone press on the button and then goes to HIGH when button is released, otherwise pull-down to GND
const int SdCardPin = 4; // SD card on ethernet shield, not used
const int ValveClosedPin = 5; // goes to LOW when the motor hits the closed switch limit, otherwise pull-up to HIGH
const int ValveOpenedPin = 6; // goes to LOW when the motor hits the open switch limit, otherwise pull-up to HIGH
const int ValveControl1 = 8; // to control the first relay that controls the motorized valve power supply
const int ValveControl2 = 7; // to control the second relay that controls the motorized valve power supply
// Note do not use D10, D11, D12 and D13 since those pins are reserved for Ethernet shield
// WaterLeakage (local)
int isWaterDetected = 0; // status as per the last good reading
// WaterLeakage (remote)
int isWaterDetectedRemotely = 0; // status as per messages received from other monitoring devices
// Motorized valve
int isValveClosed = -1; // status of motorized valve (-1 = unknown, 0 = opened, 1 = closed))
const int valveTimeOut = 15; // in sec, max time allowed to open or close valve
int isConnectedToValve = -1; // 0 when system cannot control motorized valve, 1 = connected, -1 = unknown
// Manual RESET button
volatile boolean isResetRequested = 0; // this one will change when button triggers an interrupt
// Logic
const int mainLoopDelay = 500; // a fixed delay within main loop, in ms
void(* resetFunc) (void) = 0;
// Initialization
void setup()
{
wdt_disable(); //always good to disable it, if it was left 'on' or you need init time
Serial.begin(9600);
Serial.println(F("Begin of setup"));
// HW setup
pinMode (SystemLedPin, OUTPUT);
pinMode (FaultLedPin, OUTPUT);
pinMode (AlarmLedPin, OUTPUT);
pinMode (WaterDetectorPin, INPUT);
pinMode (ToggleButtonPin, INPUT);
pinMode (ValveOpenedPin, INPUT); // 12V DC relay is idle by default. Pin is connected to NO side of the relay 1 but there is a pull-up. Pin is therefore HIGH by default.
pinMode (ValveClosedPin, INPUT); // 12V DC relay is idle by default. Pin is connected to NO side of the relay 2 but there is a pull-up. Pin is therefore HIGH by default.
pinMode (ValveControl1, OUTPUT);
digitalWrite(ValveControl1, HIGH); // 5V DC relay 1 is idle by default, i.e motor is connected to GND
pinMode (ValveControl2, OUTPUT);
digitalWrite(ValveControl2, HIGH); // 5V DC relay 2 idle by default, i.e motor is connected to GND
pinMode(SdCardPin, OUTPUT);
digitalWrite(SdCardPin, HIGH); // to disable SD card since we do not use it
// Self test
testLeds();
// Network and MQTT setup
client.setServer(server, 1883);
client.setCallback(MQTTBrokerCallback);
Ethernet.begin(mac, ip);
Serial.print(F("Current IP is : "));
Serial.print(Ethernet.localIP());
Serial.print(F(" - MQTT broker IP is : "));
Serial.println(server);
// Initialy, we don't know valve's status and limit switches are not so reliable.
// Let's open motorized valve and wait for completion. Worst case, if it is already opened, it will just hit the limit switch briefly
if (openValve() == 0)
{
Serial.println(F("Valve is open and system is now monitoring"));
// There are other monitoring devices in the house, let's listen to the faults they could report to the MQTT broker
subscribeToRemoteWaterSensors();
}
else
{
Serial.println(F("Unable to open valve, system is out of order. Please use plumbing bypass"));
};
enableInterruptOnResetButton();
delay(1500); // allow hardware to sort itself out
Serial.println(F("End of setup"));
}
// Main loop
void loop()
{
// LEDs
configureLedsWithInitialStates();
// React to reset request
if (isResetRequested == 1)
{
Serial.println(F("Someone pushed on the button to reset this device"));
publishStatus();
wdt_enable(WDTO_1S); //enable watchdog, will fire in 1 second
delay(5000);
Serial.println(F("this message should never appear"));
}
// Let's check now whether any water leakage has been detected
readLocalWaterSensor();
if (isWaterDetected == 1 || isWaterDetectedRemotely == 1)
{
if (isValveClosed == 0){ closeValve();};
}
// Publish to MQTT broker
if (mqttIntervalCnt == 0)
{
if (isWaterDetected == 1){ publishFault();}
publishStatus();
mqttIntervalCnt = mqttInterval;
}
else
{
if (isConnectedToValve == 0)
{
Serial.println(F("System is out of order - unable to control motorized valve. No monitoring in place"));
}
else
{
Serial.print(F("."));
}
mqttIntervalCnt = mqttIntervalCnt - 1;
}
// Take some rest
delay(mainLoopDelay / 2 );
client.loop();
// LEDs
configureLedsWithFinalStates();
delay(mainLoopDelay / 2);
}
//
// Local water sensor management
//
void readLocalWaterSensor()
{
isWaterDetected = !getDebouncedValue(WaterDetectorPin, 100, 10);
Serial.print(isWaterDetected);
}
//
// Reset button management
//
void enableInterruptOnResetButton()
{
isResetRequested = 0;
attachInterrupt(1, onResetRequested, CHANGE);
}
void onResetRequested()
{
detachInterrupt(1);
isResetRequested = 1;
}
// Manage valve opening sequence
int openValve()
{
Serial.print(F("Opening valve..."));
// first, confirm the valve was closed by forcing the motor to hit briefly the "closed" limit switch again (since those limit switches are not so reliable...)
setupRelays(1);
if (waitForEndOfCycle(ValveClosedPin) == 0)
{
// now, let's try to open the valve
setupRelays(2);
if (waitForEndOfCycle(ValveOpenedPin) == 0)
{
isConnectedToValve = 1;
isValveClosed = 0;
setupRelays(0); // power relays OFF
Serial.println(F(""));
return 0;
}
}
setupRelays(0); // power relays OFF
isConnectedToValve = 0;
return -1;
}
// Manage the valve closing sequence
int closeValve()
{
Serial.print(F("Closing valve..."));
// first, confirm the valve was open by forcing the motor to hit briefly the "open" limit switch again (since those limit switches are not so reliable...)
setupRelays(2);
if ( waitForEndOfCycle(ValveOpenedPin) == 0)
{
// now, let's try to close the valve
setupRelays(1);
if (waitForEndOfCycle(ValveClosedPin) == 0)
{
isConnectedToValve = 1;
isValveClosed = 1;
setupRelays(0); // power relays OFF
Serial.println(F("Valve has been turned off. Please inspect carefully all rooms and cleanup detectors"));
return 0;
}
}
setupRelays(0); // power relays OFF
isConnectedToValve = 0;
return -1;
}
// Setup the relays in order to feed the motor with the right polarity
void setupRelays(int scenario)
{
switch (scenario)
{
case 0: // all OFF, no power sent the motorized valve
digitalWrite(ValveControl1, HIGH);
digitalWrite(ValveControl2, HIGH);
break;
case 1: // closing cycle
digitalWrite(ValveControl1, HIGH);
digitalWrite(ValveControl2, LOW);
break;
case 2: // opening cycle
digitalWrite(ValveControl1, LOW);
digitalWrite(ValveControl2, HIGH);
break;
default:
Serial.print(F("Unexpected relay scenario: "));
Serial.println(scenario);
digitalWrite(ValveControl1, HIGH);
digitalWrite(ValveControl2, HIGH);
break;
}
}
// Wait until the limit switch is hit by motorized valve's motor
int waitForEndOfCycle(int limitSwitchPin)
{
int cnt = valveTimeOut;
while (cnt > 0)
{
if (getDebouncedValue(limitSwitchPin, 10, 10) == LOW)
{
return 0;
}
cnt = cnt - 1;
Serial.print(F("."));
delay(1000);
};
Serial.println(F(" - timeout reached while closing valve. Check whether valve is well powered up and cables are connected."));
return -1;
}
// This routine helps to avoid false alarms
int getDebouncedValue(int inputPin, int intervalInMs, int requiredConfirmations)
{
int confirmations = 1;
int currentValue = digitalRead(inputPin);
while (confirmations <= requiredConfirmations)
{
delay(intervalInMs);
if (currentValue == digitalRead(inputPin))
{
confirmations = confirmations + 1;
}
else
{
confirmations = 1;
currentValue = digitalRead(inputPin);
}
}
return currentValue;
}
//
// LEDs management
//
void configureLedsWithInitialStates()
{
clearLeds();
// Re-evaluate
if (isWaterDetectedRemotely == 1 || isWaterDetected == 1) { digitalWrite(AlarmLedPin, HIGH);};
if (isConnectedToValve == 0 || isConnectedToBroker == 0) { digitalWrite(FaultLedPin, HIGH);};
digitalWrite(SystemLedPin, HIGH);
}
void configureLedsWithFinalStates()
{
if (isWaterDetectedRemotely == 1) { digitalWrite(AlarmLedPin, LOW);};
if (isConnectedToBroker == 0) { digitalWrite(FaultLedPin, LOW);};
if (isValveClosed == 1) { digitalWrite(SystemLedPin, LOW);};
}
void clearLeds()
{
digitalWrite(AlarmLedPin, LOW);
digitalWrite(FaultLedPin, LOW);
digitalWrite(SystemLedPin, LOW);
}
void testLeds()
{
clearLeds();
digitalWrite(AlarmLedPin, HIGH);
delay(500);
digitalWrite(FaultLedPin, HIGH);
delay(500);
digitalWrite(SystemLedPin, HIGH);
delay(500);
clearLeds();
}
//
// MQTT related functions
//
// Handle incoming MQTT messages
void MQTTBrokerCallback(char* subscribedTopic, byte* payload, unsigned int length)
{
Serial.print(F("New message received from MQTT broker. Topic="));
Serial.print(subscribedTopic);
String payloadAsString = (char*)payload;
String realPayload = payloadAsString.substring(0,length); // otherwise we get garbage since the buffer is shared between In and Out
Serial.print(F(", content="));
Serial.print(realPayload);
if (realPayload.indexOf("WaterDetected") > 0 && realPayload.indexOf(mqttClientLocation) == -1 ) // the second part of the test is required to avoid self-triggered faults
{
isWaterDetectedRemotely = 1;
}
// for (int i=0;i<length;i++) {
// Serial.print((char)payload[i]);
// }
Serial.println();
}
// Build the client identifier
String buildClientIdentifier()
{
String data = mqttClientPrefix;
data+="_";
data+= mqttClientLocation;
data+="_";
data+= mqttClientUID;
return data;
}
// Build the topic name to be used to publish status
String buildDeviceStatusTopic()
{
String data = mqttClientPrefix;
data+="/";
data+=mqttClientLocation;
data+="/";
data+=mqttClientUID;
data+="/";
data+=mqttClientStatusTopic;
return data;
}
// Build the topic name to be used to publish/subscribe to Faults
String buildFaultTopic()
{
String data = mqttClientPrefix;
data+="/";
data+=mqttClientLocation;
data+="/";
data+=mqttClientUID;
data+="/";
data+=mqttClientFaultTopic;
return data;
}
// Build the topic name to be used to publish/subscribe to Faults
String buildAnyFaultTopic()
{
String data = mqttClientPrefix;
data+="/";
data+="+";
data+="/";
data+="+";
data+="/";
data+=mqttClientFaultTopic;
return data;
}
// Build a JSON message to send to MQTT Broker
// NOTE : MQTT_MAX_PACKET_SIZE = 128 bytes.. therefore not more than 100 for the payload
// unless you change it in /Arduino/libraries/pubSubClient/src/PubSubClient.h
String buildDeviceStatusJson()
{
String data = "{";
data+="\n";
data+="\"ResetByOperator\": ";
data+=(int)isResetRequested;
data+= ",";
data+="\n";
data+="\"WaterDetected\": ";
data+=(int)isWaterDetected;
data+= ",";
data+="\n";
data+="\"ValveClosed\": ";
data+=(int)isValveClosed;
data+= ",";
data+="\n";
data+="\"ValveDetected\": ";
data+=(int)isConnectedToValve;
data+="\n";
data+="}";
return data;
}
// Build a JSON message to send to MQTT Broker
// NOTE : MQTT_MAX_PACKET_SIZE = 128 bytes.. therefore not more than 100 for the payload
// unless you change it in /Arduino/libraries/pubSubClient/src/PubSubClient.h
String buildFaultJson()
{
String data = "{";
data+="\n";
data+="\"WaterDetected\": ";
data+=(int)isWaterDetected;
data+= ",";
data+="\n";
data+="\"Location\": ";
data+=mqttClientLocation;
data+="\n";
data+="}";
return data;
}
// Report to MQTT broker
void publishMsg(char (&topic)[200], char (&payload)[200] )
{
if (connectToBroker() == true)
{
if (client.publish(topic, payload) == true)
{
isConnectedToBroker = 1;
Serial.print(F("Message sent to MQTT broker using the following topic "));
Serial.println(topic);
}
else
{
Serial.print(F("Message NOT sent to MQTT broker using the following topic "));
Serial.println(topic);
isConnectedToBroker = 0;
}
client.loop();
}
}
// Report faults to MQTT broker
void publishFault()
{
// Topic
char topicBuffer[200];
buildFaultTopic().toCharArray(topicBuffer, 200);
// Payload
char payloadBuffer[200];
buildFaultJson().toCharArray(payloadBuffer, 200); ;
// Publish message
publishMsg(topicBuffer, payloadBuffer);
}
// Report faults to MQTT broker
void publishStatus()
{
// Topic
char topicBuffer[200];
buildDeviceStatusTopic().toCharArray(topicBuffer, 200);
// Payload
char payloadBuffer[200];
buildDeviceStatusJson().toCharArray(payloadBuffer, 200); ;
// Publish message
publishMsg(topicBuffer, payloadBuffer);
}
// Subscribe to Faults reported by other monitoring devices
void subscribeToRemoteWaterSensors()
{
if (connectToBroker() == true)
{
char tempBuffer[200];
buildAnyFaultTopic().toCharArray(tempBuffer, 200);
client.subscribe(tempBuffer); // otherwise subscriptions will growth forever..
if (client.subscribe(tempBuffer) == true)
{
isConnectedToBroker = 1;
Serial.print(F("Registred to MQTT broker as a subscriber for the following topic: "));
Serial.println(tempBuffer);
}
else
{
Serial.println(F("Not registred to MQTT broker as a subscriber"));
isConnectedToBroker = 0;
}
client.loop();
}
else
{
isConnectedToBroker = 0;
Serial.println(F("Cannot subscribe to any topic since connection to MQTT broker is not established"));
}
}
// Manage connection with MQTT broker
int connectToBroker()
{
Serial.println(F(""));
Serial.print(F("Connecting to network and to MQTT Broker... "));
char tempBuffer[200];
buildClientIdentifier().toCharArray(tempBuffer,200);
if (client.connect(tempBuffer) == true)
{
Serial.print(F("connected as "));
Serial.println(tempBuffer);
}
else
{
switch (client.state())
{
case -4:
Serial.println(F("MQTT_CONNECTION_TIMEOUT - the server didn't respond within the keepalive time"));
break;
case -3:
Serial.println(F("MQTT_CONNECTION_LOST - the network connection was broken"));
break;
case -2:
Serial.println(F("MQTT_CONNECT_FAILED - the network connection failed"));
break;
case -1:
Serial.println(F("MQTT_DISCONNECTED - the client is disconnected cleanly"));
break;
case 0:
break;
case 1:
Serial.println(F("MQTT_CONNECT_BAD_PROTOCOL - the server doesn't support the requested version of MQTT"));
break;
case 2:
Serial.println(F("MQTT_CONNECT_BAD_CLIENT_ID - the server rejected the client identifier"));
break;
case 3:
Serial.println(F("MQTT_CONNECT_UNAVAILABLE - the server was unable to accept the connection"));
break;
case 4:
Serial.println(F("MQTT_CONNECT_BAD_CREDENTIALS - the username/password were rejected"));
break;
case 5:
Serial.println(F("MQTT_CONNECT_UNAUTHORIZED - the client was not authorized to connect"));
break;
default:
Serial.print("failed, rc=");
Serial.println(client.state());
break;
}
}
return client.connected();
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
Comments