


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
This project is going to help the newbies understand Internet of Things (IoT) and how they can start working on this. For anyone, this term may look very difficult to understand and complex to work on. But I have tried my best to keep it as simple as possible to encourage new comers.
StepsBelow are the steps in which the project will flow:
- Build a basic car
- Setup Raspberry Pi
- Setup Apache server
- Setup PHP
- Make PHP pages
- Run the car
This step is very easy as you just need to follow the supplier instructions to build it using very simple DIY kit. This will give you a basic skeleton car that you can use for multiple projects. Please follow supplier instructions as shown in this video.
For this step, you can follow the instructions in this video to setup a basic Raspberry Pi. We need to install Stretch Lite as no GUI needed for this project and commandline version is enough.
Setup Apache ServerPlease follow below steps to install Apache Server. This is required to run your PHP pages and accessible via internet. After booting the Pi and log in into it (make sure it is connected to internet), please run below commands:
1. sudo apt install apache2
2. sudo service apache2 start
This should install and start Apache service.
Setup PHPPlease follow below steps to install PHP where you can have support of PHP pages. This is required to run your PHP pages. Please run below commands after installing Apache:
1. sudo apt-get install libapache2-mod-php
2. use chown command to make 'pi' (if this is your default user) get access to 'html' folder where you will keep your PHP scripts.
3. use chmod +x command to make your scripts executable
Make PHP PageNow, this section needs your more attention as it contains the actual work to build the IoT car software. All above steps were pre-requisites for this. There are three PHP pages (you can combine them as well).
1. index.php (captures arrow keys from keyboard and send command to car)
2. control.php (captures arrow images clicks from from page and send command to car)
3. gpio.php (process and control car motors)
index.php code:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<title>Raspberry Pi Vehicle</title>
</head>
<body style="background-color: white;">
<?php
$val_array = array(1,2,3,4);
echo ("<img id='st_sp' src='data/start_stop.png' style='position:absolute; top:20px; left:20px; width:170px; height:150px' onclick='engine()'/>");
?>
<div><img id='indi' src='data/red_led.png' style='position:absolute; top:20px; left:200px; width:20px; height:20px'/></div>
<script src="https://ajax.googleapis.com/ajax/libs/jquery/3.3.1/jquery.min.js"></script>
<script type="text/javascript">
var status=0;
function engine() {
if(status==0){
document.getElementById("indi").src="data/green_led.png"
status=1;
}
else if(status==1){
document.getElementById("indi").src="data/red_led.png"
status=0;
}
}
$(document).ready(function(){
$(window).keydown(function (e) {
$k_code=e.keyCode;
$k_char=String.fromCharCode(e.keyCode);
var pin = <?php echo $val_array[0]; ?>;
if( status==1 ){
if($k_code==37){ //left key
call_php(pin);
}
else if($k_code==38){ //up key
call_php(pin);
}
else if($k_code==39){ //right key
call_php(pin);
}
else if($k_code==40){ //down key
call_php(pin);
}
}
else{
alert ("Please Start Engine!");
}});
});
function call_php(pin){
var request = new XMLHttpRequest();
request.open( "GET" , "gpio.php?pin=" + pin, true);
request.send(null);
}
</script>
<iframe src="control.php" frameborder='0'; style='position:absolute; top:410px; left:450px; width:400px; height:200px'></iframe>
</body>
</html>
control.php code:
<html>
<body>
<?php
$val_array = array(1,2,3,4);
//this php script generate the first page in function of the file
for ( $i= 0; $i<3; $i++) {
//set the pin's mode to output and read them
system("gpio mode ".$i." out");
}
echo ("<img id='up' src='data/up.png' style='position:absolute; top:10px; left:150px; width:80px; height:80px' onclick='moveup()'/>");
echo ("<img id='down' style='position:absolute; top:110px; left:150px; width:80px; height:80px' src='data/down.png' onclick='movedwn()'/>");
echo ("<img id='right' style='position:absolute; top:60px; left:230px; width:80px; height:80px' src='data/right.png' onclick='movert()'/>");
echo ("<img id='left' style='position:absolute; top:60px; left:70px; width:80px; height:80px' src='data/left.png' onclick='movelt()'/>");
?>
<!-- javascript -->
<script type="text/javascript">
function moveup() {
var pin = <?php echo $val_array[0]; ?>;
call_php(pin);
return false;
}
function movedwn() {
var pin = <?php echo $val_array[1]; ?>;
call_php(pin);
return false;
}
function movert() {
var pin = <?php echo $val_array[2]; ?>;
call_php(pin);
return false;
}
function movelt() {
var pin = <?php echo $val_array[3]; ?>;
call_php(pin);
return false;
}
function call_php(pin){
var request = new XMLHttpRequest();
request.open( "GET" , "gpio.php?pin=" + pin, true);
request.send(null);
}
</script>
</body>
</html>
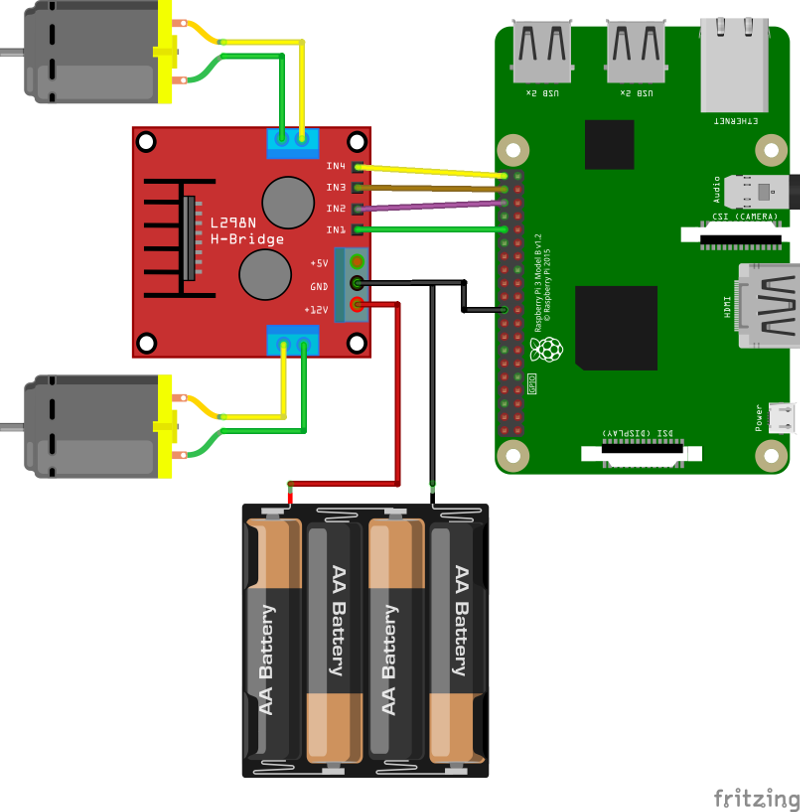
P.S: $val_array = array(1, 2, 3, 4) contains GPIO pins to which H-Bridge (L298N) is connected.
gpio.php code:
<?php
if (isset ( $_GET["pin"] )) {
$pin = strip_tags ($_GET["pin"]);
if ($pin == 0) {
echo pin;
system("gpio mode 4 out");
system("gpio write 4 1");
system("gpio mode 5 out");
system("gpio write 5 0");
system("gpio mode 28 out");
system("gpio write 28 0");
system("gpio mode 29 out");
system("gpio write 29 1");
}
else if ($pin == 2) {
echo pin;
system("gpio mode 4 out");
system("gpio write 4 0");
system("gpio mode 5 out");
system("gpio write 5 1");
system("gpio mode 28 out");
system("gpio write 28 1");
system("gpio mode 29 out");
system("gpio write 29 0");
}
else if ($pin == 3) {
echo pin;
system("gpio mode 4 out");
system("gpio write 4 1");
system("gpio mode 5 out");
system("gpio write 5 0");
system("gpio mode 28 out");
system("gpio write 28 1");
system("gpio mode 29 out");
system("gpio write 29 0");
}
else if ($pin == 7) {
echo pin;
system("gpio mode 4 out");
system("gpio write 4 0");
system("gpio mode 5 out");
system("gpio write 5 1");
system("gpio mode 28 out");
system("gpio write 28 0");
system("gpio mode 29 out");
system("gpio write 29 1");
}
else {
echo ("fail");
}
}
else { echo ("fail"); }
?>
you need to copy all above php files to 'html' folder and make sure they are executable by 'pi' user. Then make a folder 'data' to copy all below image files used in the PHP pages.
Make sure the filenames are same as used in php files.
Also make sure that you have GPIO package installed on your raspberry pi otherwise follow below steps:
1. sudo apt-get purge wiringpi
2. hash -r
3. git clone git://git.drogon.net/wiringPi
4. cd ~/wiringPi
4. git pull origin
6. cd ~/wiringPi
7. ./build
use gpio readll command to check status of all pins.
Check this video to see the car in action:
OperationClick on Engine Start/Stop button. Indicator should turn Green which shows you can operate your car now. Now either use keyboard arrow keys or click on navigation buttons to control the car.






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments