


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
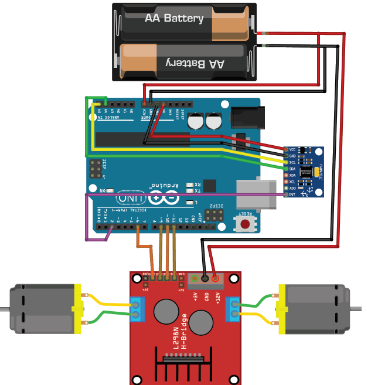
This project is about self-balancing the robot. in this, we can learn the balancing concept and how to control the motors. and it's working is very simple. we use a3-axis accelerometer which interfaces Arduino and sends some analog value to the Arduino which could be x-axis, y-axis, and z-axis. visit Our website techatronic for full tutorial and video.

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments