
Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
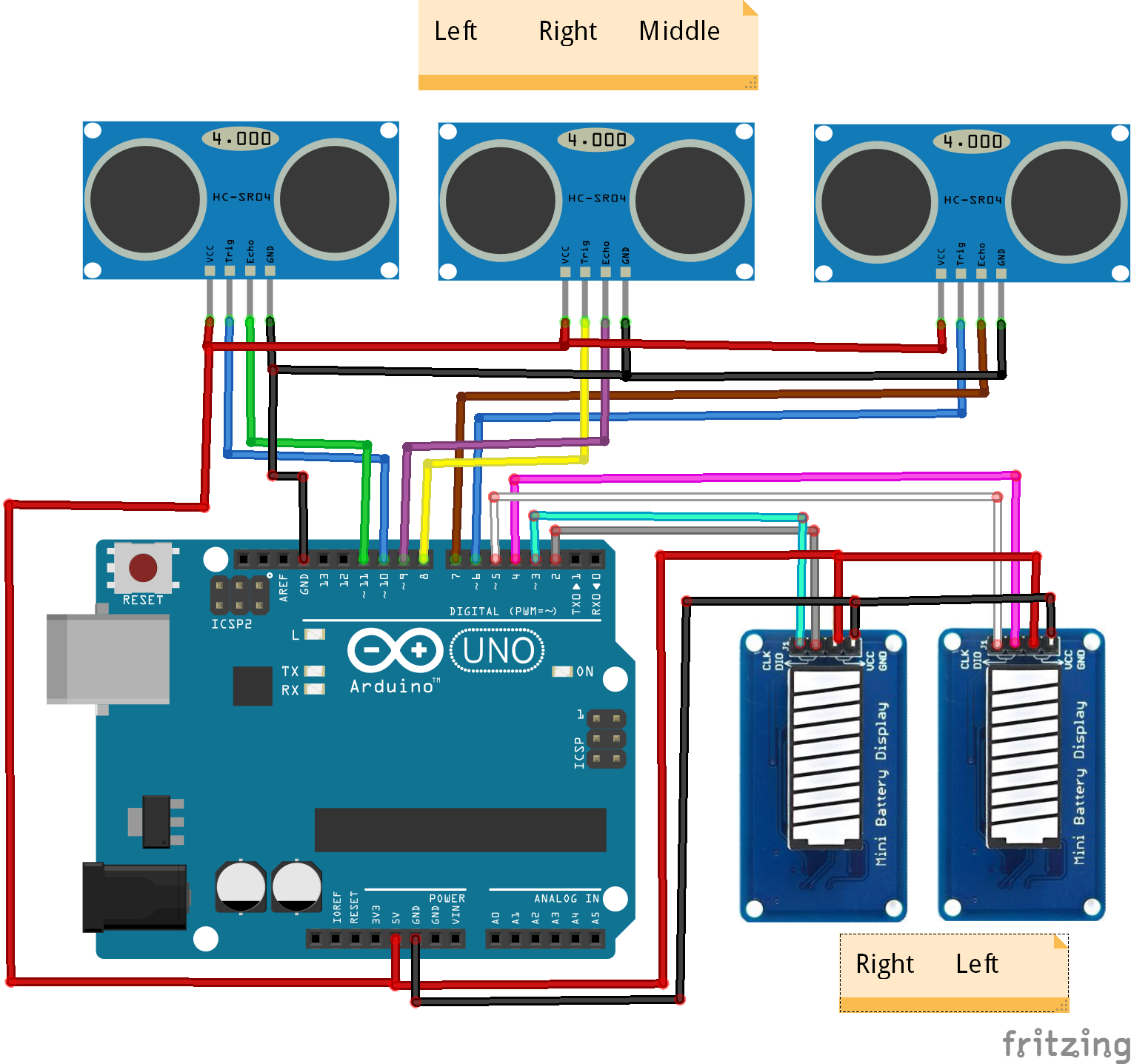
Hi, this project is about a DIY Parking Radar Sensor, it's very easy to make, it's based around the HC SR-04 Ultrasound sensor, I'm using 3 of them: One for each side and one for the middle, then 2 mini battery displays, that are actually made to show you the stat of the battery, but here I'm using it to show the distance between the sensors and the obstacles, depending on which side, also it depends on the maximum distance that you can set, above that distance it's considered enough space always, below that the displays will change depending on that distance and its direction.
Those are the parts I used, you can add few jump wires and a breadboard if you want. (The battery display is based on TM1651 chip)
There are 3 ultrasound modules: Right, Middle and Left, and two displays: Right and LEFT. The Middle sensor can affect both displays, but the two others can only affect their respective sides.
For example there are two obstacles, one on the Right side and one the Middle, the code will take the closest one to show it on the display,.
If the middle is the closest both displays will change according to its distance.
If the right side is the closest the right display will change and be lower than the left side.
There's a max distance that you can set from the code, above that distance it's considered safe and the display will light up at full, below that distance the displays start to change and it's proportionnal to the maximum distance.
Examples
Here are few cases to make it easy to explain
The last case can happen if you have obstacles at the middle and right (right one is closer) or at the left and the right side (right side closer), or all sides but (right is closer).
Improvements:
- You can add other sensors to cover a large area
- Add a screen to show the distance value
- Change the sensors to a waterproof ones like JSN SR-04
- Add sound








{kind=link}
Comments