


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
I have wanted a simple, quite pleasant to look at and still functional multimedia controller for my computers, and media players. With the help of a rotary encoder and an Arduino Pro-Micro I get a really small and simple circuit, that still has all the commands that I want/need. With its small size and simple usability it is also easy to build it into a good looking enclosure. (Which is not done at the time of this publishing).
Step 1So first we need to add Multimedia keyboard functionality to the Pro-Micro. I have done a nice video tutorial for that here:
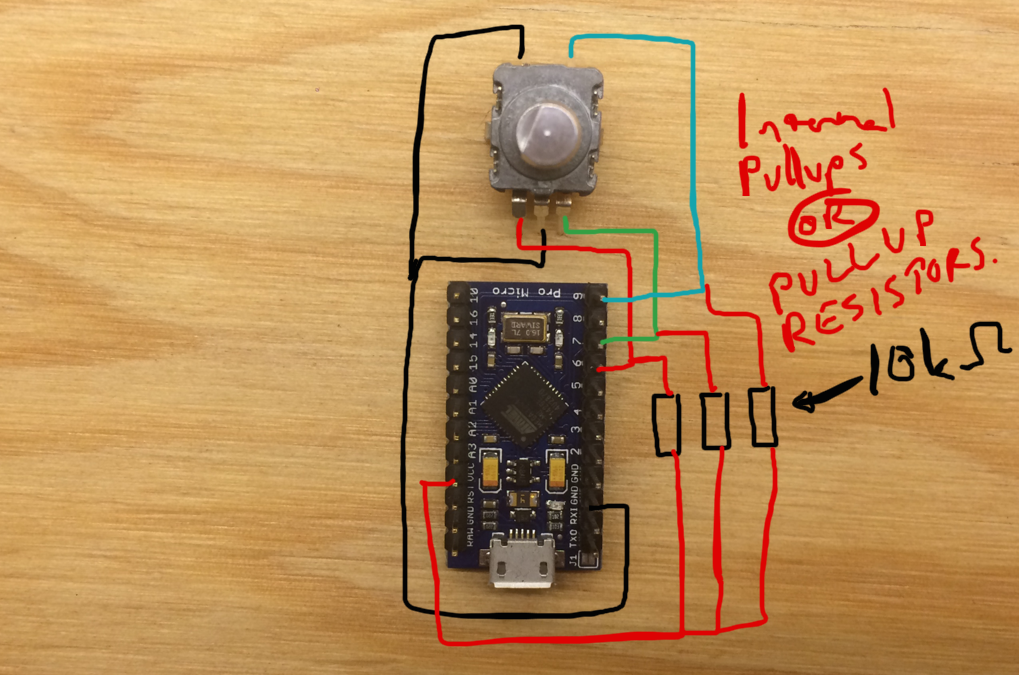
Step 2Next step is to create the rotary encoder interface and connect it to the Pro-Micro as well as uploading the code. I've done another video for that step, which you can see here:
The last step, will be to make a beautiful but still useable enclosure/user interface for the controller. Come up.



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments