

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
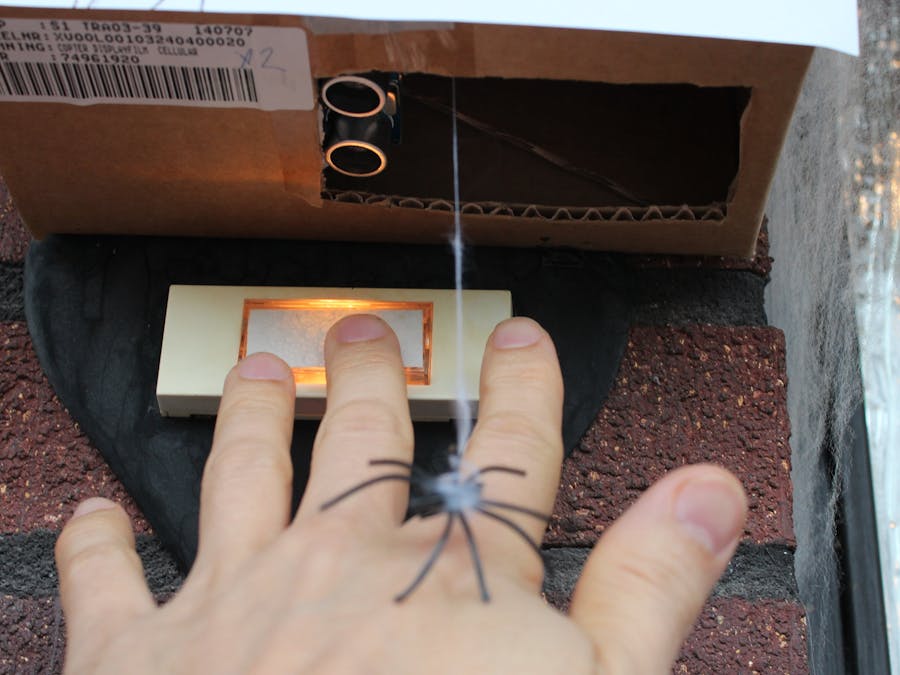
My son Max came up with the idea to drop a spider on anyone who rang our doorbell this Halloween. I was ofcourse quick to "jump" on the idea, and we started to work on it as soon as we could. It is a really simple build, using an Arduino and a small sketch we put a ultrasonic distance sensor (HC-SR04) to sense when someone came close to the doorbell, and then a servo quickly "dropped" a spider in a string on the visitors hand. Letting it dangle for a bit before it was retracted again. It was great fun to build and took short enough time to keep a kid interested through the build ;)
All the instructions is in this short video tutorial:
Enjoy, and hope you scare someone this Halloween! >:)

5 projects • 34 followers
Maker, Dad, Geek, Musician, System Engineer, Android Tinkerer... (Not in that specific order)





Comments