#include <Servo.h> //Includes servo library
Servo finger1, finger2, finger3, finger4, finger5;
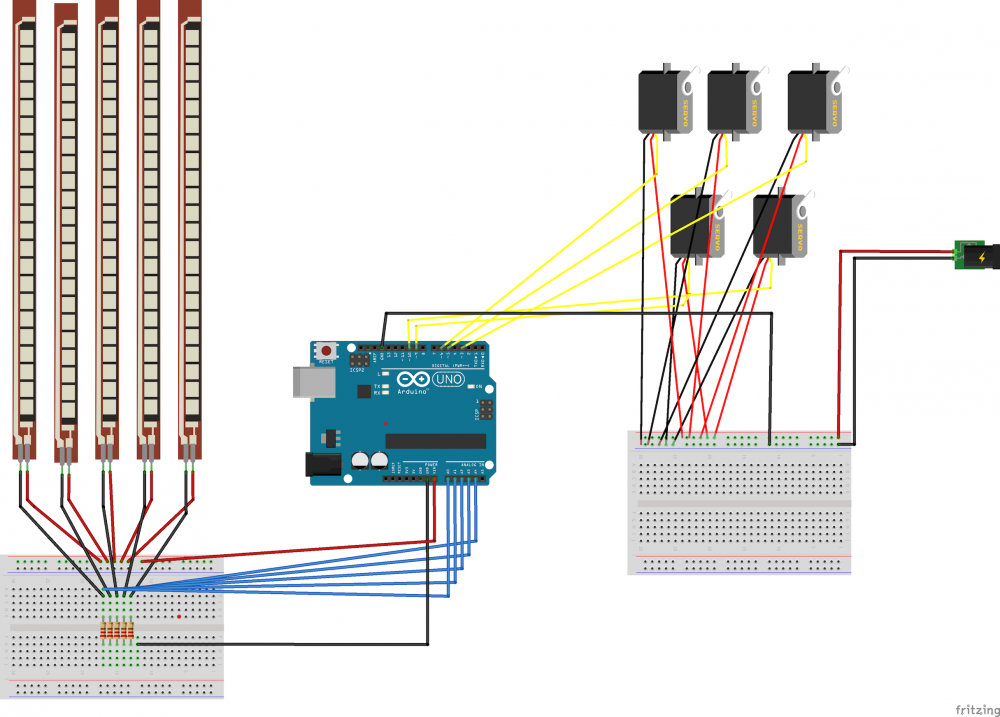
int servoPin1 = 5;
int servoPin2 = 6;
int servoPin3 = 9;
int servoPin4 = 10;
int servoPin5 = 3;
int flexPin1 = A0;
int flexPin2 = A1;
int flexPin3 = A2;
int flexPin4 = A3;
int flexPin5 = A4;
void setup()
{
//Attach the servo objects to their respective pins
finger1.attach(servoPin1);
finger2.attach(servoPin2);
finger3.attach(servoPin3);
finger4.attach(servoPin4);
finger5.attach(servoPin5);
/* set each servo pin to output; I'm not acutally sure if this is
even necessary, but I did just in case it is */
pinMode(servoPin1, OUTPUT);
pinMode(servoPin2, OUTPUT);
pinMode(servoPin3, OUTPUT);
pinMode(servoPin4, OUTPUT);
pinMode(servoPin5, OUTPUT);
//Set each flex sensor pin to input: this is necessary
pinMode(flexPin1, INPUT);
pinMode(flexPin2, INPUT);
pinMode(flexPin3, INPUT);
pinMode(flexPin4, INPUT);
pinMode(flexPin5, INPUT);
}
void loop()
{
//Defines analog input variables
int flex1 = analogRead(flexPin1);
int flex2 = analogRead(flexPin2);
int flex3 = analogRead(flexPin3);
int flex4 = analogRead(flexPin4);
int flex5 = analogRead(flexPin5);
/* Defines "pos" variables as being proportional to the flex inputs.
The 400 to 700 value range seemed adequate for my sensors, but you can change
yours accordingly. */
int pos1 = map(flex1, 400, 700, 0, 180);
pos1 = constrain(pos1, 0, 180);
int pos2 = map(flex2, 400, 700, 0, 180);
pos2 = constrain(pos2, 0, 180);
int pos3 = map(flex3, 400, 700, 0, 180);
pos3 = constrain(pos3, 0, 180);
int pos4 = map(flex4, 480, 640, 0, 180);
pos4 = constrain(pos4, 0, 180);
int pos5 = map(flex5, 400, 700, 0, 180);
pos5 = constrain(pos5, 0, 180);
//Tells servos to move by the amount specified in the "pos" variables
finger1.write(pos1);
finger2.write(pos2);
finger3.write(pos3);
finger4.write(pos4);
finger5.write(pos5);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
Comments