



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Parkinson's disease is a progressive nervous system disorder that affects movement. Symptoms start gradually, sometimes starting with a barely noticeable tremor in just one hand. Tremors are common, but the disorder also commonly causes stiffness or slowing of movement.
In the early stages of Parkinson's disease, your face may show little or no expression. Your arms may not swing when you walk. Your speech may become soft or slurred. Parkinson's disease symptoms worsen as your condition progresses over time.
Although Parkinson's disease can't be cured, medications might significantly improve your symptoms. Occasionally, your doctor may suggest surgery to regulate certain regions of your brain and improve your symptoms.
SymptomsParkinson's disease signs and symptoms can be different for everyone. Early signs may be mild and go unnoticed. Symptoms often begin on one side of your body and usually remain worse on that side, even after symptoms begin to affect both sides.
Parkinson's signs and symptoms may include:
- Tremor. A tremor, or shaking, usually begins in a limb, often your hand or fingers. You may a rub your thumb and forefinger back-and-forth, known as a pill-rolling tremor. Your hand may tremor when it's at rest.
- Slowed movement (bradykinesia). Over time, Parkinson's disease may slow your movement, making simple tasks difficult and time-consuming. Your steps may become shorter when you walk. It may be difficult to get out of a chair. You may drag your feet as you try to walk.
- Rigid muscles. Muscle stiffness may occur in any part of your body. The stiff muscles can be painful and limit your range of motion.
- Impaired posture and balance. Your posture may become stooped, or you may have balance problems as a result of Parkinson's disease.
- Loss of automatic movements. You may have a decreased ability to perform unconscious movements, including blinking, smiling or swinging your arms when you walk.
- Speech changes. You may speak softly, quickly, slur or hesitate before talking. Your speech may be more of a monotone rather than with the usual inflections.
- Writing changes. It may become hard to write, and your writing may appear small.
Reference: https://www.mayoclinic.org/diseases-conditions/parkinsons-disease/symptoms-causes/syc-20376055
We were greatly inspired by Liftware Steady (https://www.liftware.com/steady/) which is a product sold for this very purpose.
The goal of our project was to be able to understand what are the system dynamics and leanings which can be accrued by building a similar project with off the shelf components.
Initial Design IdeaWe realized early on that this was expected to be a challenging project and would take the team in arenas of motion control, physics and 3D math that we had a working knowledge of, and this project helped us put our theory into practice.
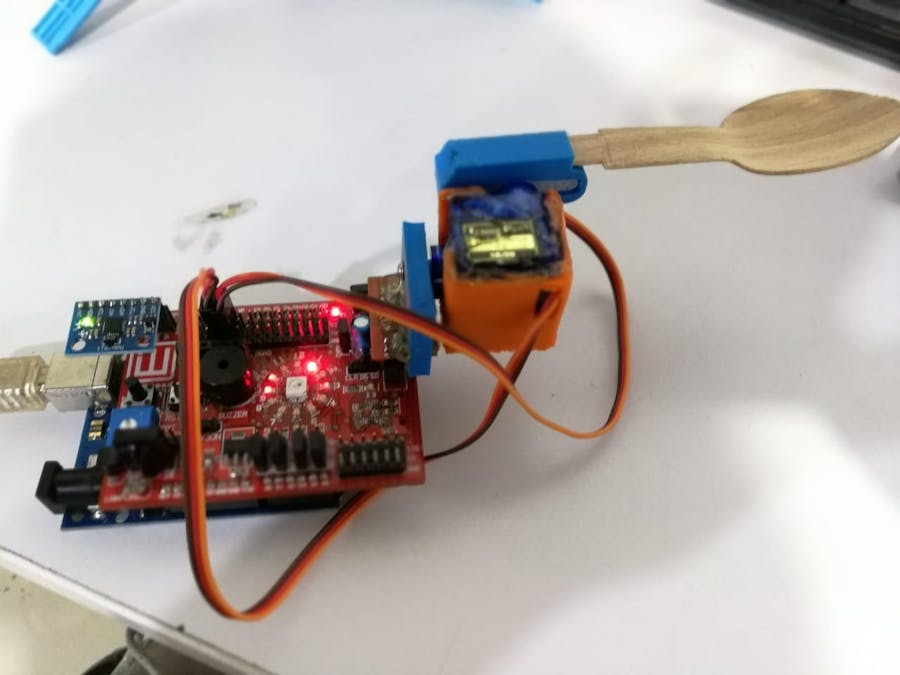
The design was expected to be held in hand and be able to help cancel out any tremors the person's hand felt, thus providing the ability to level and steady out a spoon held at the end of the prototype.
It was obvious we had to use some kind of sensor which could measure tilt, acceleration, relative and absolute if need be. Fortunately, the MPU6050 from Invensense was a module we had used in the past, and were confident that it would deliver us the dynamic response (speed of measurements) we wished to have.
We needed to be able to move the spoon fast enough and accurately enough, and figured out that a hobby servo can be used. These have a reasonably fast response and can deliver good torque.
We are the makers of the Idiotware Shield, and it was a natural choice for us to use it in the project, so we could get going as quickly as 5 minutes with all the wiring and hardware configurations.
Steps to Build the ProjectOver a couple of days, we were able to first figure out the values of the MPU6050 sensor and the built a custom two axis rotational mechanism using two servo motors ( whose axes were placed orthogonally) and a couple of pieces of 3D prints.
Looking AheadOur initial questions got answered well in our first prototype. Some of our assumptions about speed and response were close to what we saw in actual.
- Make the prototype still smaller using an ATtiny/ATmega328 bare bones on a PCB, with hand wiring
- Fix servos more closely
- Put a 18650 battery to run the project
Subscribe to receive updates on the project and the project page.







Comments