Since I was a kid I have always wanted a RC car. Unfortunately, for many reasons, I have never got one. So, one day, I decided to make one all by myself.
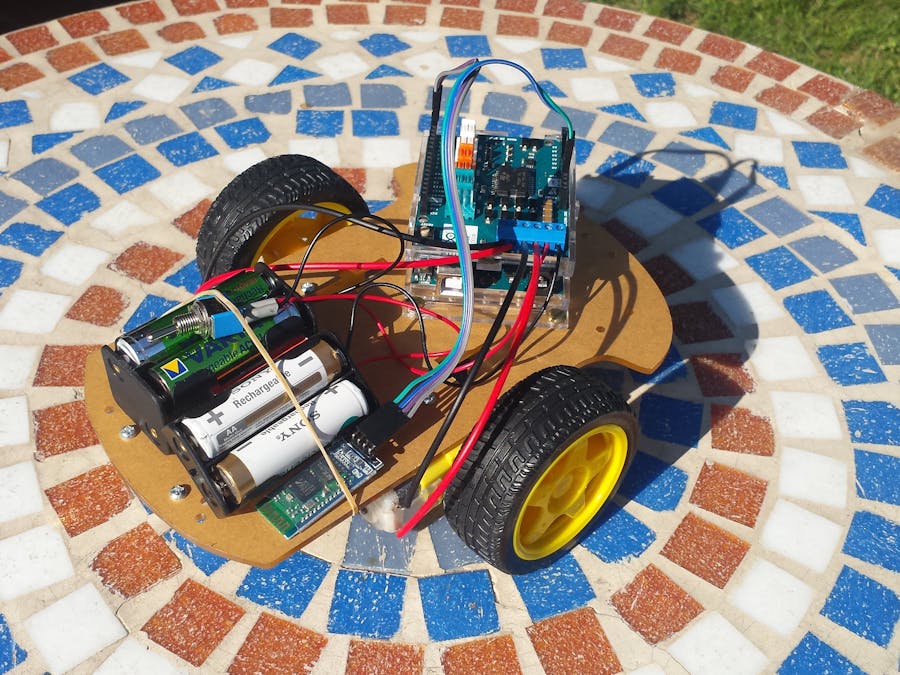
I thought it would have been better if I had controlled it directly with my smartphone and if it had been simple, without any camera or sensor. I did not want to make it too fancy, I just wanted something that you can turn on, make it going around an have fun with it.
I ended up making, in my opinion, one of the best demonstration of how easy and satisfying is creating something with Arduino. Without almost any effort, everyone can replicate this project and start learning Arduino.


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








Comments