

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
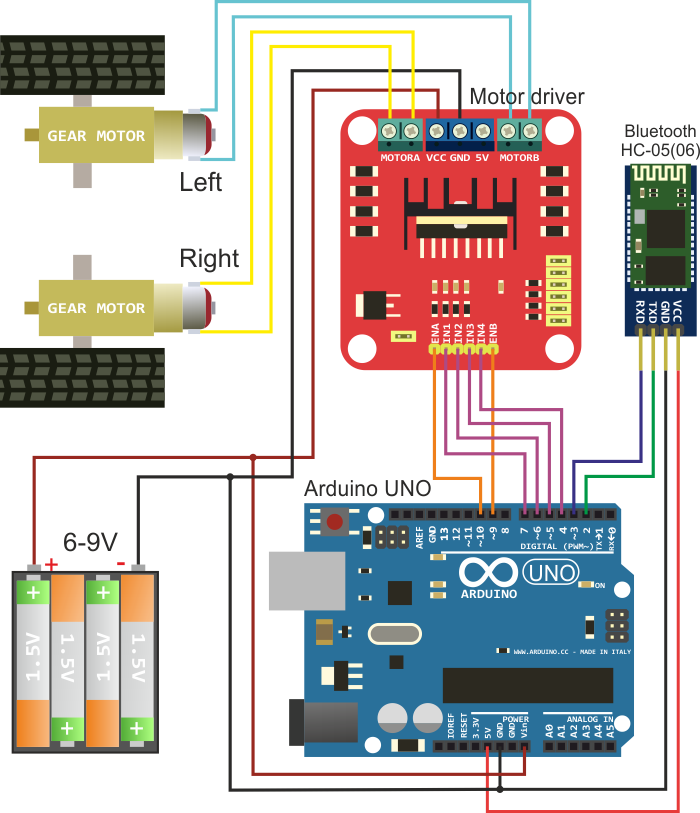
Build robotcar using any available platform built on two-wheel circuit. Connection diagram of electronic components is shown in the figure below. You will need Arduino UNO or compliant board, Bluetooth HC-05 (06) module, motor driver, and power supply battery. Gear motors are placed on the platform and force to move robot wheels.
Step 2.
Go to RemoteXY service website on http://remotexy.com/en/editor/ and create a graphical user interface to control the robot. Set a control feature using the G-sensor for joystick. An example of interface is in the figure below. Click the button "Get source code".
Download the source code of GUI and open it in Arduino IDE. For compilation you need RemoteXY.h library; the library can be downloaded from the link http://remotexy.com/en/library/ . You can already try to load code in Arduino and connect with mobile application. But while this is only the code blank, then you will need to add required functionality linking a graphical interface and motor driver.
Step 4.Then you need to add robot control functionality to the source code using a graphical interface. For this purpose the field RemoteXY structure. RemoteXY structure displays all of your GUI controls.
The resulting source code is shown below. You can compile it and upload it to Arduino.
Step 5.Install a mobile application RemoteXY on http://remotexy.com/en/download/ . When the application is running on a mobile device, press Bluetooth button connection in the list, select the name of your Bluetooth module, for HC-05 (06) modules the name typically will be INVOR or HC-06.
It works!




{kind=link}
Comments