//declare the pins used by the shift registers
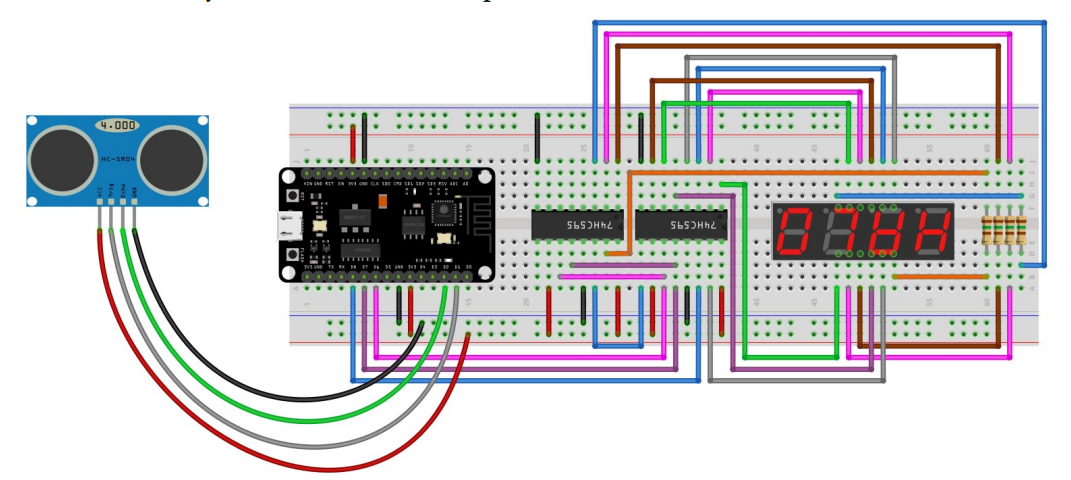
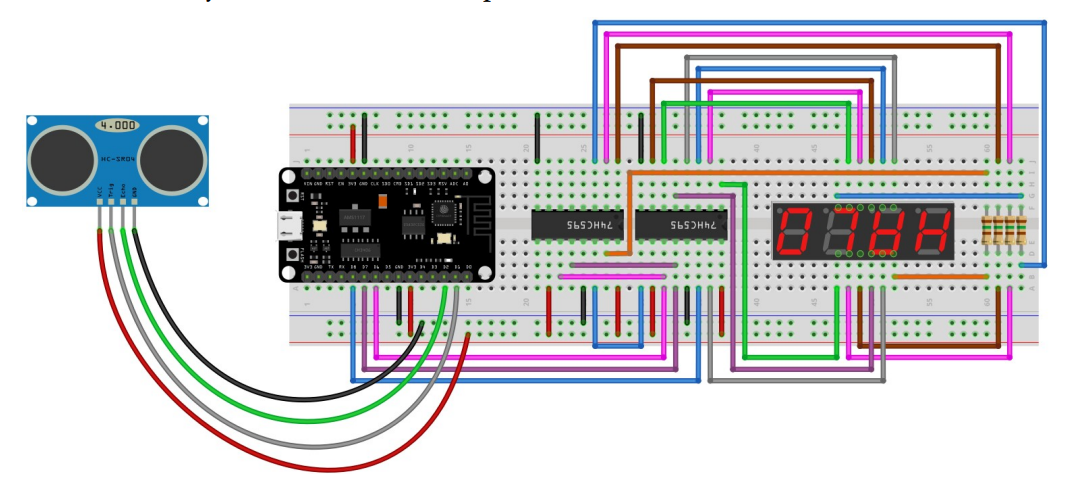
const int dataPin = D8;
const int latchPin = D7;
const int clockPin = D6;
//declare the pins used by the ultrasonic module
const int echoPin = D2;
const int trigPin = D1;
//declare a byte variable to store the current digit active
byte digit;
//the next byte variable will tell us when the third digit
//is active, so the dot next to it will turn on
byte dot;
//declare an array of 4 int elements in which we will be
//storing the figures that are going to be displayed on each
//digit of the display
int digits[4];
//this variable will tells us which is the current digit
int currentDigit = 0;
//declare the exponential moving average
double ema = 0;
//function that will trigger every
//move the function to RAM using ICACHE_RAM_ATTR
void ICACHE_RAM_ATTR timer_function()
{
//select the digit
Digit(currentDigit);
//if we are at the third digit, then modify the bit
//for the dor from 0 to 1
if(currentDigit == 2)
dot = 0b10000000;
//display the number on the selected digit
Number(digits[currentDigit]);
//go to the next digit
currentDigit++;
//if we are at the last digit, then go to the first one
if(currentDigit > 3)
currentDigit = 0;
//initialize this function again after 4 ms
timer1_write(20000);
}
void setup()
{
//set the pins used by the shift registers to output
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(dataPin, OUTPUT);
//the trigger pin (transmitter) must be set as OUTPUT
pinMode(trigPin, OUTPUT);
//the echo pin (receiver) must be set as INPUT
pinMode(echoPin, INPUT);
//initialize the timer every 4 ms
//enable the timer with the divider TIM_DIV16 which
//has a value of 5 ticks/microsecond
timer1_attachInterrupt(timer_function);
timer1_enable(TIM_DIV16, 0, 0);
//divide the ticks by 5 and that is the value in microseconds
timer1_write(20000);
}
void loop()
{
//calculate the distance
calculate_distance();
}
void calculate_distance()
{
//set the trigPin LOW in order to prepare for the next reading
digitalWrite(trigPin, LOW);
//delay for 2 microseconds
delayMicroseconds(2);
//generate a ultrasound for 10 microseconds then turn off the transmitter
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
//reads the echoPin, returns the sound wave travel time in microseconds
long duration = pulseIn(echoPin, HIGH, 400*2/0.034);
//using the formula shown in the guide, calculate the distance
double distance = duration*0.034/2;
//calculate the Exponential Moving Average
double k = 2.0/(10+1);
ema = distance*k + ema*(1-k);
//multiply the ema by 10 to get also the first decimal
int dist = (int)(ema*10);
//if the modified distance is greater than 0, then extract the figures
if(dist > 0)
{
digits[3] = dist%10;
digits[2] = (dist/10)%10;
digits[1] = (dist/100)%10;
digits[0] = dist/1000;
}
//wait 50 ms before next reading
delay(100);
}
//this function is used to select the digit to be turned on
void Digit(int x)
{
//turn off all the digits and segments
//because we use a common cathode display, to turn off the digits
//we have to set them to HIGH
//15 written as 8 bits is B00001111
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, 15);
shiftOut(dataPin, clockPin, MSBFIRST, 0);
digitalWrite(latchPin, 1);
//reset the dot variable
dot = 0;
//the switch statement is used to select the right digit
switch(x)
{
case 0:
//prepare to turn on only the first digit
digit = 14; //B00001110
//break is used to get out from the switch function
break;
case 1:
//prepare to turn on only the second digit
digit = 13; //B00001101
break;
case 2:
//prepare to turn on only the third digit
digit = 11; //B00001011
break;
default:
//prepare to turn on only the fourth digit
digit = 7; //B00000111
break;
}
}
//this function is used to select a number to display
void Number(int x)
{
//deppending on the value of x, using the switch statement
//we are calling a specific function to display on the selected
//digit a number indicated by the name of the function
switch(x)
{
default:
zero();
break;
case 1:
one();
break;
case 2:
two();
break;
case 3:
three();
break;
case 4:
four();
break;
case 5:
five();
break;
case 6:
six();
break;
case 7:
seven();
break;
case 8:
eight();
break;
case 9:
nine();
break;
}
}
//to make our code shorter and to have only one function for
//zero, one etc., we are going to use the bitwise OR operator
//to change the bit for the dot before sending it to the
//shift register
void zero()
{
//display on the selected digit a "0"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b00111111 | dot);
digitalWrite(latchPin, 1);
}
void one()
{
//display on the selected digit a "1"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b00000110 | dot);
digitalWrite(latchPin, 1);
}
void two()
{
//display on the selected digit a "2"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01011011 | dot);
digitalWrite(latchPin, 1);
}
void three()
{
//display on the selected digit a "3"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01001111 | dot);
digitalWrite(latchPin, 1);
}
void four()
{
//display on the selected digit a "4"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01100110 | dot);
digitalWrite(latchPin, 1);
}
void five()
{
//display on the selected digit a "5"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01101101 | dot);
digitalWrite(latchPin, 1);
}
void six()
{
//display on the selected digit a "6"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01111101 | dot);
digitalWrite(latchPin, 1);
}
void seven()
{
//display on the selected digit a "7"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b00000111 | dot);
digitalWrite(latchPin, 1);
}
void eight()
{
//display on the selected digit a "8"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01111111 | dot);
digitalWrite(latchPin, 1);
}
void nine()
{
//display on the selected digit a "9"
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, MSBFIRST, digit);
shiftOut(dataPin, clockPin, MSBFIRST, 0b01101111 | dot);
digitalWrite(latchPin, 1);
}










{kind=link}
Comments