This project is about a car that can avoid its forward objects. Basically its my first project uploading. I started using arduino from December, 2019 and then I came in contact with the l293d motor driver shield. primarily, I was not able to make this. But thanks to the arduino society, for their help
::::::::::::::::::::::::::::::::::::::::::::::::::BASIC INSTRUCTIONS:::::::::::::::::::::::::::::::::::::::::::::::::
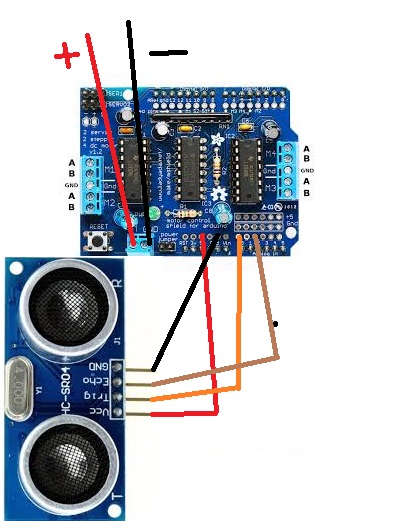
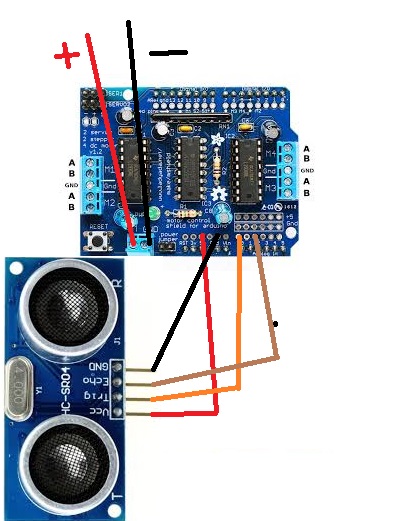
1.Please connect the leftside motors accordingly on M3 and M4. and rightside motors on M1 and M2.
2. Use 3.7v li-ion batteries(use a switch to control it). Here 9v batteries are not so efficient(cause I used them previously and the motors barely move).
3.connect the trigpin and echopin of ultrasonic sensor accordingly to the A0 and A2 pin on motor driver shield.
4. Place the ultrasonic sensor frontside of your structure. You can change the code as you please.
HAPPYCODINGANDBESTOFLUCK.
''''Look up at the stars and not down at your feet. Try to make sense of what you see, and wonder about what makes the universe exist. Be curious.''''
Stephen Hawking


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









{kind=link}
Comments