
This is basically a arduino based homemade ventilator for emrgency like covid patient which is not able to get breath automaticaly by their lungs.So, it can be usedformanualbreathingmachine.
it is live saver, that may change life.
Iwasdecidedtomakeitbecauseasweknowatthis time ventilator is very essential things for life.
THIS SENTENCE IS FOR INDIANS ONLY - ZINDGI MAIN AB CHAR CHEZZE IMPORTANT HAI ROTTI, KAPDA, MAKAN, AUR VENTILATOR.
For working it contain arduino naon as its brain. An 16x2 lcd display for operating with i2c module in it. It has micro servo for pressing ambu bag. AMBU is stands for Artificial Manual Breathing Unit. It is a bag which takes oxygen from atmosphere and it will transfer oxygen to patient with the help of face mask, and last thing it is contain is 10k ohm pottentiometer for controlling breathing speed and angle.
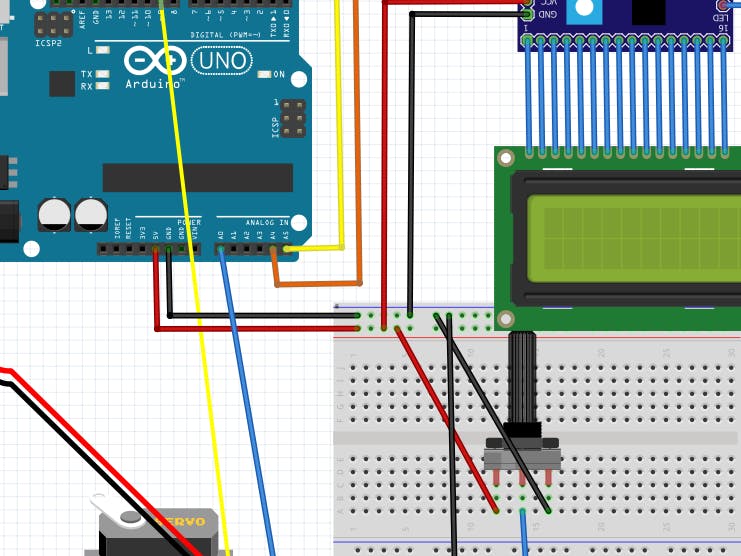
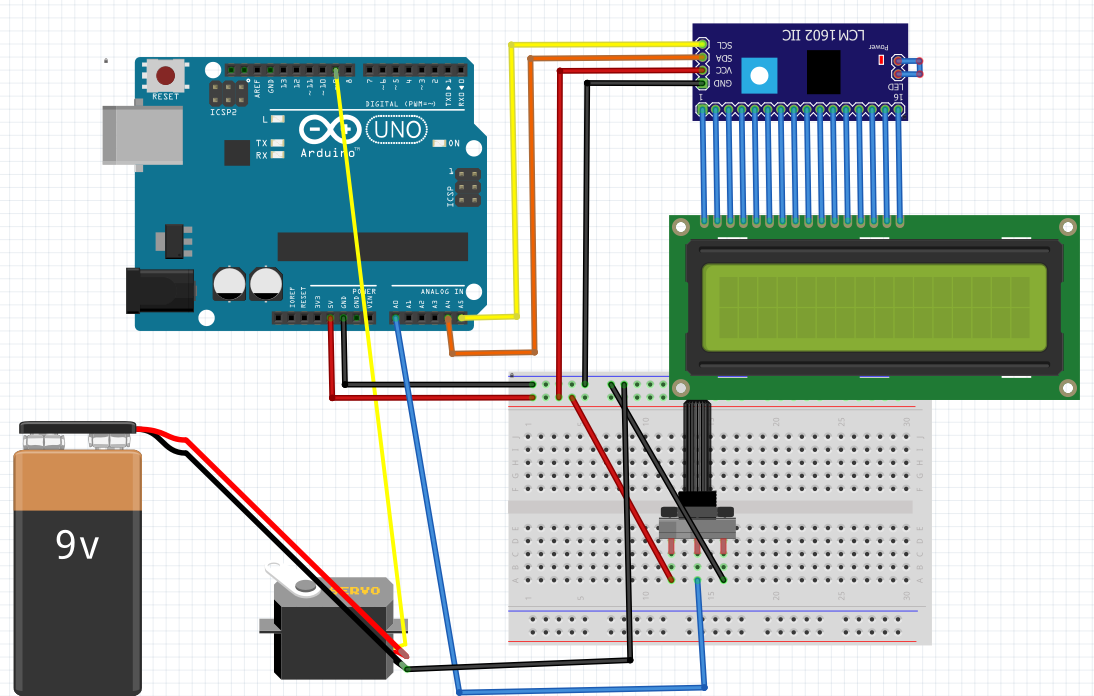
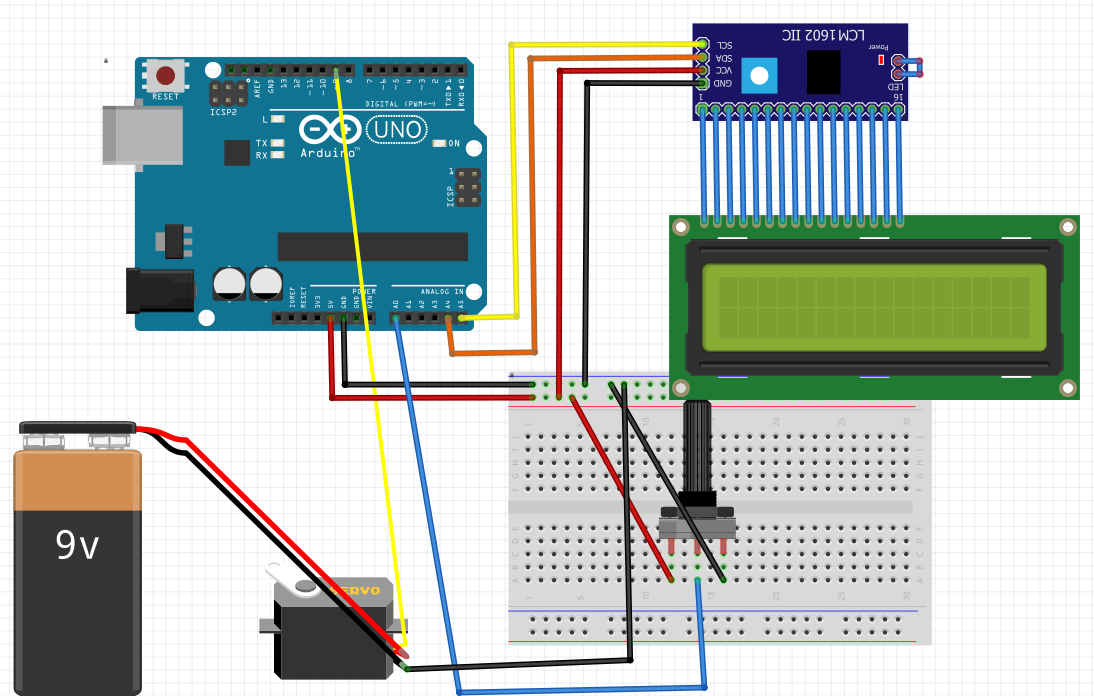
HERE, IT IS A CIRCUIT DIAGRAM OF IT
for any inquiry please whatsapp +91886907927
{kind=link}

Comments