


Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 18 | ||||
 |
| × | 1 | |||
UPDATED 5-31-2017
- Added more and new code.
- Added new youtube video
Well to start with, The MEGA BREAD series is for my son to begin learning robotics. This thingamabob will walk around, detect obstacles, and accept Bluetooth when completed fully.
Other plans for this bot include: Remote delivery and pickup using GPS and a hefty race Quad Copter. Having the ability to land on top of the Hexapod, latch on using an Electromagnet, and fly off. The bot will then be delivered to your location of choosing.
This step will require the remainder of the summer to complete, But should win him a place in the local robotics competition.
This bot is controlled using old Atari Joysticks, and a radio transmitter/receiver setup.
Wish us luck....
/* MEGA BREAD -- SIGHT
###################################
# Datatypes (KEYWORD1)
###################################
NewPing KEYWORD1
###################################
# Methods and Functions (KEYWORD2)
###################################
ping KEYWORD2
ping_in KEYWORD2
ping_cm KEYWORD2
ping_median KEYWORD2
ping_timer KEYWORD2
check_timer KEYWORD2
timer_us KEYWORD2
timer_ms KEYWORD2
timer_stop KEYWORD2
convert_in KEYWORD2
convert_cm KEYWORD2
###################################
# Constants (LITERAL1)
###################################*/
#include <NewPing.h>
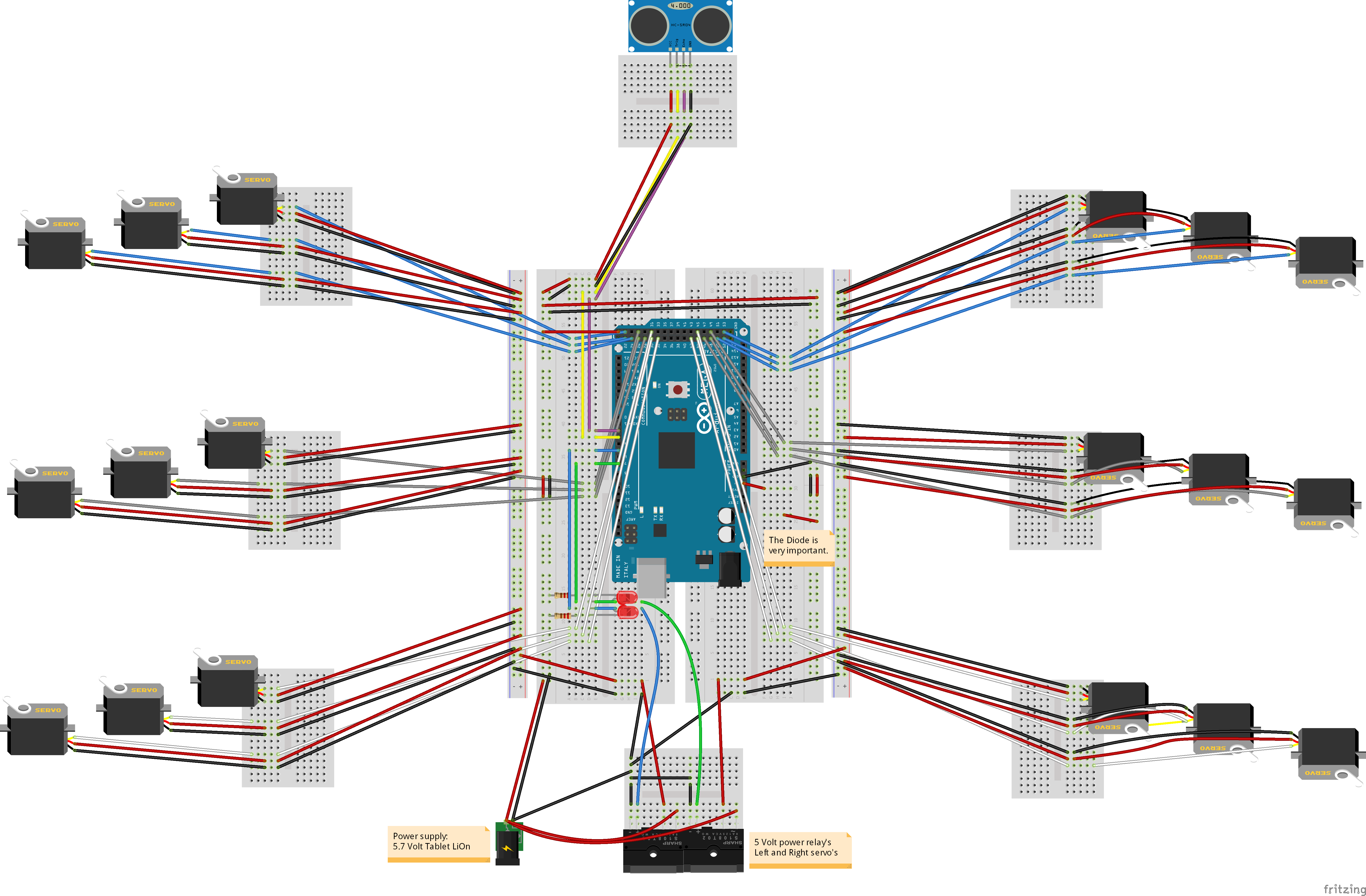
#define TRIGGER_PIN 53 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 52 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
/*SERVO SETUP - MEGA BREAD
Usable pins on the MEGA
Servos analogWrite Pins Timers used
1 - 12 not pins 44,45,46 Timer 5
13 - 24 not pins 11,12,44,45,46 Timers 1 & 5
24 - 36 not pins 6,7,8,11,12,44,45,46 Timers 1,4 & 5
37 - 48 not pins 2,3,5,6,7,8,11,12,44,45,46 Timers 1,3,4 & 5*/
#include <Servo.h>
int legCount = 6;
int servoSpeed = 2;
int delayTimeA = 50;
int delayTimeB = 100;
int trueMidPos = 90;
int minPos = 60;
int maxPos = 110;
int midPos = ((maxPos - minPos) / 2) + minPos;
int lPos = midPos;
int rPos = midPos;
int aSectionlSideModifier = 0;
int aSectionrSideModifier = -0;
int bSectionlSideModifier = 0;
int bSectionrSideModifier = -0;
int cSectionlSideModifier = 10;
int cSectionrSideModifier = -10;
Servo LFA;
Servo LFB;
Servo LFC;
int ServoPinLFA = 22;
int ServoPinLFB = 23;
int ServoPinLFC = 24;
Servo LMA;
Servo LMB;
Servo LMC;
int ServoPinLMA = 26;
int ServoPinLMB = 27;
int ServoPinLMC = 28;
Servo LRA;
Servo LRB;
Servo LRC;
int ServoPinLRA = 30;
int ServoPinLRB = 31;
int ServoPinLRC = 32;
Servo RFA;
Servo RFB;
Servo RFC;
int ServoPinRFA = 34;
int ServoPinRFB = 35;
int ServoPinRFC = 36;
Servo RMA;
Servo RMB;
Servo RMC;
int ServoPinRMA = 38;
int ServoPinRMB = 39;
int ServoPinRMC = 40;
Servo RRA;
Servo RRB;
Servo RRC;
int ServoPinRRA = 42;
int ServoPinRRB = 43;
int ServoPinRRC = 44;
void distanceCheck() {
delay(delayTimeA); // Wait delayTimeB in MS. 29ms should be the shortest delay between pings.
Serial.print("Ping: ");
Serial.print(sonar.ping_cm()); // Send ping, get distance in cm and print result (0 = outside set distance range)
Serial.println("cm");
}
//Head Setup
Servo HeadTwist;
Servo HeadTilt;
int ServoPinHeadTwist = 46;
int ServoPinHeadTilt = 47;
// HEAD TWIST
void headTwist() {
for (lPos = maxPos; lPos >= minPos; lPos -= servoSpeed) {
// rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
// constrain(rPos, minPos, maxPos);
HeadTwist.write(lPos);
// HeadTilt.write(rPos);
delay(delayTimeA);
distanceCheck();
}
delay(delayTimeB);
for (lPos = minPos; lPos <= maxPos; lPos += servoSpeed) {
// rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
// constrain(rPos, minPos, maxPos);
HeadTwist.write(lPos);
// HeadTilt.write(rPos);
delay(delayTimeA);
distanceCheck();
}
}
// HEAD TILT
void headTilt() {
for (lPos = maxPos; lPos >= minPos; lPos -= servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
// HeadTwist.write(lPos);
HeadTilt.write(rPos);
delay(delayTimeA);
}
}
void AllLegsFlex() {
// Forward Leg Swing
for (lPos = maxPos; lPos >= minPos; lPos -= servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(lPos);
LMA.write(rPos);
LRA.write(lPos);
RFA.write(rPos);
RMA.write(lPos);
RRA.write(rPos);
LFB.write(lPos);
LMB.write(rPos);
LRB.write(lPos);
RFB.write(rPos);
RMB.write(lPos);
RRB.write(rPos);
LFC.write(lPos);
LMC.write(rPos);
LRC.write(lPos);
RFC.write(rPos);
RMC.write(lPos);
RRC.write(rPos);
delay(delayTimeA);
}
// Rearward Leg Swing
for (lPos = minPos; lPos <= maxPos; lPos += servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(lPos);
LMA.write(rPos);
LRA.write(lPos);
RFA.write(rPos);
RMA.write(lPos);
RRA.write(rPos);
LFB.write(lPos);
LMB.write(rPos);
LRB.write(lPos);
RFB.write(rPos);
RMB.write(lPos);
RRB.write(rPos);
LFC.write(lPos);
LMC.write(rPos);
LRC.write(lPos);
RFC.write(rPos);
RMC.write(lPos);
RRC.write(rPos);
delay(delayTimeA);
}
}
void updownLegsFlex() {
// Upward Leg Swing
for (lPos = maxPos; lPos >= minPos; lPos -= servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(trueMidPos);
LMA.write(trueMidPos);
LRA.write(trueMidPos);
RFA.write(trueMidPos);
RMA.write(trueMidPos);
RRA.write(trueMidPos);
LFB.write(lPos + bSectionlSideModifier);
LMB.write(lPos + bSectionlSideModifier);
LRB.write(lPos + bSectionlSideModifier);
RFB.write(rPos + bSectionrSideModifier);
RMB.write(rPos + bSectionrSideModifier);
RRB.write(rPos + bSectionrSideModifier);
LFC.write(lPos + cSectionlSideModifier);
LMC.write(lPos + cSectionlSideModifier);
LRC.write(lPos + cSectionlSideModifier);
RFC.write(rPos + cSectionrSideModifier);
RMC.write(rPos + cSectionrSideModifier);
RRC.write(rPos + cSectionrSideModifier);
delay(delayTimeA);
}
// Downward Leg Swing
for (lPos = minPos; lPos <= maxPos; lPos += servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(trueMidPos);
LMA.write(trueMidPos);
LRA.write(trueMidPos);
RFA.write(trueMidPos);
RMA.write(trueMidPos);
RRA.write(trueMidPos);
LFB.write(lPos + bSectionlSideModifier);
LMB.write(lPos + bSectionlSideModifier);
LRB.write(lPos + bSectionlSideModifier);
RFB.write(rPos + bSectionrSideModifier);
RMB.write(rPos + bSectionrSideModifier);
RRB.write(rPos + bSectionrSideModifier);
LFC.write(lPos + cSectionlSideModifier);
LMC.write(lPos + cSectionlSideModifier);
LRC.write(lPos + cSectionlSideModifier);
RFC.write(rPos + cSectionrSideModifier);
RMC.write(rPos + cSectionrSideModifier);
RRC.write(rPos + cSectionrSideModifier);
delay(delayTimeA);
}
}
void tipLegsFlex() {
// tip out Leg Swing
for (lPos = maxPos; lPos >= minPos; lPos -= servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(trueMidPos);
LMA.write(trueMidPos);
LRA.write(trueMidPos);
RFA.write(trueMidPos);
RMA.write(trueMidPos);
RRA.write(trueMidPos);
LFB.write(midPos);
LMB.write(midPos);
LRB.write(midPos);
RFB.write(midPos);
RMB.write(midPos);
RRB.write(midPos);
LFC.write(lPos);
LMC.write(lPos);
LRC.write(lPos);
RFC.write(rPos);
RMC.write(rPos);
RRC.write(rPos);
delay(delayTimeA);
}
// tip in Leg Swing
for (lPos = minPos; lPos <= maxPos; lPos += servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(trueMidPos);
LMA.write(trueMidPos);
LRA.write(trueMidPos);
RFA.write(trueMidPos);
RMA.write(trueMidPos);
RRA.write(trueMidPos);
LFB.write(midPos);
LMB.write(midPos);
LRB.write(midPos);
RFB.write(midPos);
RMB.write(midPos);
RRB.write(midPos);
LFC.write(lPos);
LMC.write(lPos);
LRC.write(lPos);
RFC.write(rPos);
RMC.write(rPos);
RRC.write(rPos);
delay(delayTimeA);
}
}
void midLegsFlex() {
// mid down Leg Swing
for (lPos = maxPos; lPos >= minPos; lPos -= servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(trueMidPos);
LMA.write(trueMidPos);
LRA.write(trueMidPos);
RFA.write(trueMidPos);
RMA.write(trueMidPos);
RRA.write(trueMidPos);
LFB.write(midPos);
LMB.write(midPos);
LRB.write(midPos);
RFB.write(midPos);
RMB.write(midPos);
RRB.write(midPos);
LFC.write(lPos);
LMC.write(lPos);
LRC.write(lPos);
RFC.write(rPos);
RMC.write(rPos);
RRC.write(rPos);
delay(delayTimeA);
}
// mid up Leg Swing
for (lPos = minPos; lPos <= maxPos; lPos += servoSpeed) {
rPos = map(lPos, minPos, maxPos, maxPos, minPos);
constrain(lPos, minPos, maxPos);
constrain(rPos, minPos, maxPos);
LFA.write(trueMidPos);
LMA.write(trueMidPos);
LRA.write(trueMidPos);
RFA.write(trueMidPos);
RMA.write(trueMidPos);
RRA.write(trueMidPos);
LFB.write(midPos);
LMB.write(midPos);
LRB.write(midPos);
RFB.write(midPos);
RMB.write(midPos);
RRB.write(midPos);
LFC.write(lPos);
LMC.write(lPos);
LRC.write(lPos);
RFC.write(rPos);
RMC.write(rPos);
RRC.write(rPos);
delay(delayTimeA);
}
delay(delayTimeB);
}
void setup() {
Serial.begin(9600);
LFA.attach(ServoPinLFA);
LMA.attach(ServoPinLMA);
LRA.attach(ServoPinLRA);
RFA.attach(ServoPinRFA);
RMA.attach(ServoPinRMA);
RRA.attach(ServoPinRRA);
LFB.attach(ServoPinLFB);
LMB.attach(ServoPinLMB);
LRB.attach(ServoPinLRB);
RFB.attach(ServoPinRFB);
RMB.attach(ServoPinRMB);
RRB.attach(ServoPinRRB);
LFC.attach(ServoPinLFC);
LMC.attach(ServoPinLMC);
LRC.attach(ServoPinLRC);
RFC.attach(ServoPinRFC);
RMC.attach(ServoPinRMC);
RRC.attach(ServoPinRRC);
HeadTwist.attach(ServoPinHeadTwist);
HeadTilt.attach(ServoPinHeadTilt);
}
void loop() {
// AllLegsFlex();
//delay(delayTimeB);
// updownLegsFlex();
//delay(delayTimeB);
// tipLegsFlex();
//delay(delayTimeB);
// midLegsFlex();
headTwist();
delay(delayTimeB);
// headTilt();
// delay(delayTimeB);
// distanceCheck();
// delay(delayTimeB);
}
MEGA BREAD - Hank the Hexabot Code
NixNot yet published due to development issues for pickup and delivery of the bot from the air.
No preview (download only).

Pigeon-Kicker
19 projects • 31 followers
Computer guru from the 80's, currently disabled veteran.
Building this stuffs for my son to learn robotics.
Thanks to Mini Pigeon.

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments