/*----------------------------------------------------------------------*
* *
An example that uses both short and long button presses.
* *
A simple state where a short press of the button turns on blink of
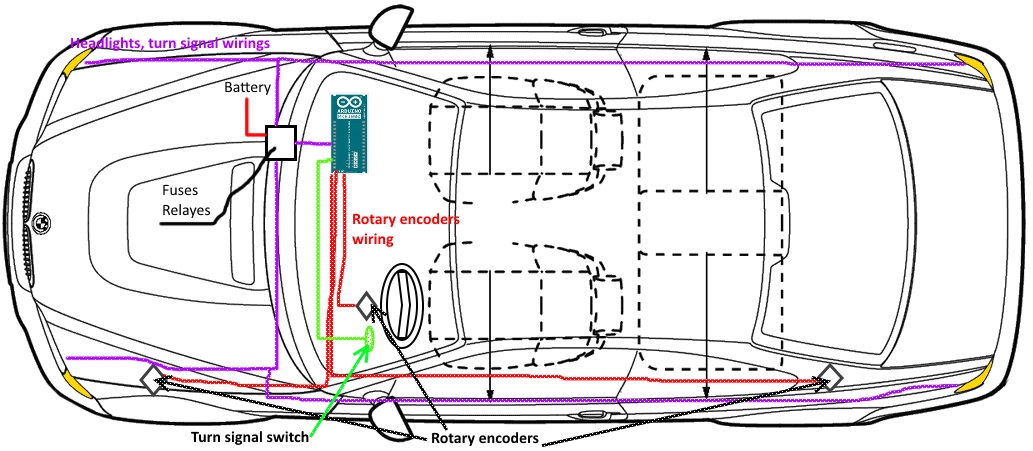
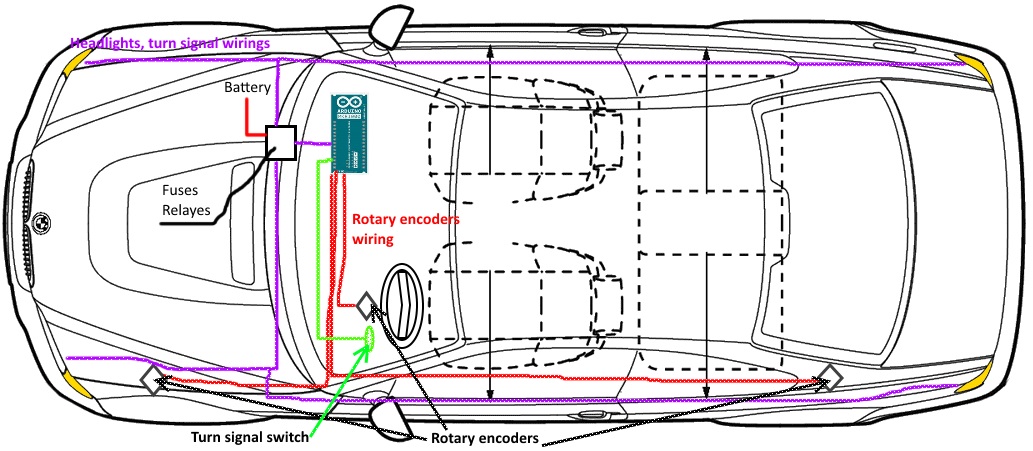
turn led, and a long press turns the side Light LED on.
Driving two steppers concurrently with the Arduino Nano.
stepper1 follows two potentiometers on analog input 2 and 3.
stepper2 follows rotary encoder on digital inputm 2, 3, 12.
A timeout is used to turn off coils and save energy in battery
operated applications.
Hardware:
Arduino NANO.
Drivers: ULN2003A
Stepper Motors: 28BYJ48, 5VDC, step angle 5.625 °
Gear reduction 64:1
No-load starting frequency:> = 500PPS (4 rpm)
Coil resistance 60 Ohms.
-----------------------------------------------------*/
#include <MultiStepper.h> //https://arduino-info.wikispaces.com/SmallSteppers
#include <AccelStepper.h> //same as above.
#include <Button.h> //https://github.com/JChristensen/Button
#include <Stepper.h> //http://arduining.com/category/driving-motors/
#define STEPS 4096 // 64(fullsteps) * 64 (reduction ratio)
#define SPEED 4 // motor speed (RPM)
#define COIL1 8 //Stepper1 make adjusting of headlight hight
#define COIL2 9
#define COIL3 10
#define COIL4 11
//#define COIL5 0 //Stepper2 make adjusting of headlight horizontal position
//#define COIL6 1
//#define COIL7 2
//#define COIL8 3
#define POTFR A2
#define POTRR A3
#define TIMEOUT 1000 //Turns off after 1 sec of inactivity.
#define NOISE 8 //inmunity in steps because analog noisy readings.
#define BUTTONL_PIN A0 //Connect a tactile button switch (or something similar) from Arduino pin 2 to ground.
#define BUTTONR_PIN A1 //For Right turn switch
#define PULLUP true //To keep things simple, we use the Arduino's internal pullup resistor.
#define INVERT true //Since the pullup resistor will keep the pin high unless the
//switch is closed, this is negative logic, i.e. a high state
//means the button is NOT pressed. (Assuming a normally open switch.)
#define DEBOUNCE_MS 20 //A debounce time of 20 milliseconds usually works well for tactile button switches.
#define LEDL_PIN 7 //The standard Arduino "Pin 2" LED Left.
#define LEDR_PIN 4 //The standard Arduino "Pin 3" LED Right.
#define LEDLF_PIN 5 //The standard Arduino "Pin 5" LED Left Fade.
#define LEDRF_PIN 6 //The standard Arduino "Pin 6" LED Right Fade.
#define LONG_PRESS 1200 //We define a "long press" to be 1000 milliseconds.
#define SHORT_PRESS 300
#define BLINK_INTERVAL 300 //In the BLINK state, switch the LED every 100 milliseconds.
//============== For Rotary start code====================================================
// NOTE: The sequence 1-3-2-4 is required for proper sequencing of 28BYJ48
// create an instance of the stepper class:
//Stepper stepper1(STEPS, COIL1, COIL2, COIL3, COIL4);
AccelStepper stepper(STEPS, COIL1, COIL3, COIL2, COIL4);
//AccelStepper stepper2(STEPS, COIL5, COIL7, COIL6, COIL8);
//============== Code ending for Rotary & Starting for buttons ==========================
Button myBtnL(BUTTONL_PIN, PULLUP, INVERT, DEBOUNCE_MS); //Declare the button Left
Button myBtnR(BUTTONR_PIN, PULLUP, INVERT, DEBOUNCE_MS); //Declare the button Right
//The list of possible states for the state machine. This state machine has a fixed
//sequence of states, i.e. ONOFF --> TO_BLINK --> BLINK --> TO_ONOFF --> ONOFF
//Note that while the user perceives two "modes", i.e. ON/OFF mode and rapid blink mode,
//two extra states are needed in the state machine to transition between these modes.
enum {ONOFF, TO_BLINK, BLINK, TO_ONOFF};
uint8_t STATE; //The current state machine state
boolean ledStateR, ledStateL; //The current LED status
unsigned long ms; //The current time from millis()
unsigned long msLast; //The last time the LED was switched
int pos = 0 ; //Position in steps(0-630)= (0°-315°)
int newpos;
unsigned long stamp; // last move time stamped.
int brightnessL = 0; // how bright the LED is
int fadeAmountL = 55; // how many points to fade the LED by
int brightnessR = 0; // how bright the LED is
int fadeAmountR = 55; // how many points to fade the LED by
int myResult = 2; //times to blink
//-----------------------------------------------------------------------------
//Check for inactivity and turn off the steppers coils to save battery.
void CheckTimeout() {
if ((millis() - stamp) > TIMEOUT) { //Turn Off StepperX coils.
digitalWrite(COIL1, LOW);
digitalWrite(COIL2, LOW);
digitalWrite(COIL3, LOW);
digitalWrite(COIL4, LOW);
}
/* if ((millis() - stampY) > TIMEOUT) { //Turn Off StepperY coils.
digitalWrite(COIL5, LOW);
digitalWrite(COIL6, LOW);
digitalWrite(COIL7, LOW);
digitalWrite(COIL8, LOW);
}*/
}
void setup(void){
{
stepper.setMaxSpeed(1000.0); // set the motor max speed.
stepper.setAcceleration(100.0); // set the motor Acceleration.
stepper.setSpeed(SPEED); // set the motor speed.
// stepper2.setMaxSpeed(1000.0); // set the motor max speed.
// stepper2.setAcceleration(50.0); // set the motor Acceleration.
// stepper2.setSpeed(SPEED); // set the motor speed.
// Serial.begin(9600); //for debuging.
}
{
pinMode(LEDL_PIN, OUTPUT); //Set the Left turn LED pin as an output
pinMode(LEDR_PIN, OUTPUT); //Set the Right turn LED pin as an output
pinMode(LEDLF_PIN, OUTPUT); //Set the Left Light LED pin as an output
pinMode(LEDRF_PIN, OUTPUT); //Set the Left Light LED pin as an output
}
}
void loop(){
{
int val = analogRead(POTFR); //get the potentiometer value (range 0-1023)
int val2 = analogRead(POTRR); //get the potentiometer value (range 0-1023)
val= map(val,0,1023,-100,100); // map pot range in the stepper range.
val2= map(val2,0,1023,-100,100); // map pot range in the stepper range.
/* int analog_in = analogRead(POTFR);
stepper.moveTo(analog_in);
stepper.setSpeed(100);
stepper.runSpeedToPosition();
*/
if(abs(val - val2)> NOISE){ //if diference is greater than 2 steps.
if(newpos = (val - val2));
if(newpos > pos){
stepper.moveTo(-newpos); // move one step to the left.
// stepper.run();
// val = millis();
// val2 = millis();
pos++;
}
// stepper1.run();
if(newpos = (val - val2));
if(newpos < pos){
stepper.moveTo(-newpos); // move one step to the right.
// stepper.run();
// val = millis();
// val2 = millis();
pos--;
}
}
stepper.run();
// Serial.println(pos); //for debuging...
// Serial.println(val);
// Serial.println(val2);
// Serial.println(newpos);
// delay(100);
CheckTimeout(); //check for inactivity.
}
ms = millis(); //record the current time
myBtnL.read(); //Read Left button
myBtnR.read(); //Read Right button
switch (STATE) {
//This state watches for short and long presses, switches the LED for
//short presses, and moves to the TO_BLINK state for long presses.
case ONOFF:{
if (myBtnL.isPressed()){ //button pressed
BlinkL(); //so blink Left turn LED
}
if (myBtnL.wasPressedFor(SHORT_PRESS)){ //if button pressed for short time,
fastBlinkL(); //blink Left turn LED 3 times.
}
else if (myBtnL.pressedFor(LONG_PRESS)){ //if button pressed for long time,
STATE = TO_BLINK; //go to the next state.
}
}
{
if (myBtnR.isPressed()){
BlinkR();
}
if (myBtnR.wasPressedFor(SHORT_PRESS)){
fastBlinkR();
}
else if (myBtnR.pressedFor(LONG_PRESS)){
STATE = TO_BLINK;
}
}
break;
//This is a transition state where we start the fast blink as feedback to the user,
//but we also need to wait for the user to release the button, i.e. end the
//long press, before moving to the BLINK state.
case TO_BLINK:
if (myBtnL.wasReleased()){
digitalWrite(LEDL_PIN, LOW);
ledStateL = false;
}
if (myBtnR.wasReleased()){
digitalWrite(LEDR_PIN, LOW);
ledStateR = false;
}
else
STATE = BLINK;
break;
//The fast-blink state. Watch for another long press which will cause us to
//turn the LED off (as feedback to the user) and move to the TO_ONOFF state.
case BLINK:
if (myBtnL.isPressed()) {
for(int fadeValue = 0 ; fadeValue <= 255; fadeValue +=10){
analogWrite(LEDLF_PIN, fadeValue);
delay(0); // wait for 0 milliseconds to see the dimming effect
}
// switchFadeLin();
BlinkL(); // we still need blinking, while side light on
}
if (myBtnR.isPressed()) {
for(int fadeValue = 0 ; fadeValue <= 255; fadeValue +=10){
analogWrite(LEDRF_PIN, fadeValue);
delay(0);
}
// switchFadeRin();
BlinkR(); // we still need blinking, while side light on
}
else
STATE = TO_ONOFF;
break;
//This is a transition state where we just wait for the user to release the button
//before moving back to the ONOFF state.
case TO_ONOFF:
if (myBtnL.wasReleased()){
delay(2000);
for(int fadeValue = 255 ; fadeValue <= 0; fadeValue -=50){
analogWrite(LEDLF_PIN, fadeValue);
delay(30);
// analogWrite(LEDLF_PIN, LOW);
// switchFadeLout();
// ledStateL = false;
// STATE = ONOFF;
}
}
if (myBtnR.wasReleased()){
delay(2000);
for(int fadeValue = 255 ; fadeValue <= 0; fadeValue -=50){
analogWrite(LEDRF_PIN, fadeValue);
delay(30);
// analogWrite(LEDLF_PIN, LOW);
// switchFadeLout();
// ledStateL = false;
// STATE = ONOFF;
}
}
if (myBtnR.isReleased()){
analogWrite(LEDRF_PIN, LOW);
digitalWrite(LEDR_PIN, LOW);
STATE = ONOFF;
}
if (myBtnL.isReleased()){
analogWrite(LEDLF_PIN, LOW);
digitalWrite(LEDL_PIN, LOW);
STATE = ONOFF;
}
break;
}
}
//-----Reverse the current LED state. If it's on, turn it off. If it's off, turn it on.-------
void switchLEDL()
{
msLast = ms; //record the last switch time
ledStateL = !ledStateL;
// ledState = false;
digitalWrite(LEDL_PIN, ledStateL);
}
void switchLEDR()
{
msLast = ms; //record the last switch time
ledStateR = !ledStateR;
// ledState = false;
digitalWrite(LEDR_PIN, ledStateR);
}
//------------------Blink with the turn LED "myResult" times.---------------------------------
void fastBlinkL()
{
for (int counter = 1; counter <= myResult; counter = counter + 1) {
digitalWrite(LEDL_PIN, HIGH);
delay(BLINK_INTERVAL);
digitalWrite(LEDL_PIN, LOW);
delay(BLINK_INTERVAL);
}
ledStateL = false;
}
void fastBlinkR()
{
for (int counter = 1; counter <= myResult; counter = counter + 1) {
digitalWrite(LEDR_PIN, HIGH);
delay(BLINK_INTERVAL);
digitalWrite(LEDR_PIN, LOW);
delay(BLINK_INTERVAL);
}
ledStateR = false;
}
//------------------------------Blink with the LED.-------------------------------------------
void BlinkL()
{
digitalWrite(LEDL_PIN, HIGH);
delay(BLINK_INTERVAL);
digitalWrite(LEDL_PIN, LOW);
delay(BLINK_INTERVAL);
ledStateL = false;
}
void BlinkR()
{
digitalWrite(LEDR_PIN, HIGH);
delay(BLINK_INTERVAL);
digitalWrite(LEDR_PIN, LOW);
delay(BLINK_INTERVAL);
ledStateR = false;
}
//--------------------------Turno ON the LED with fade effect.------------------------------
void switchFadeLin()
{
analogWrite(LEDLF_PIN, brightnessL); // set the brightness of pin 9:
brightnessL = brightnessL + fadeAmountL; // change the brightness for next time through the loop
if (brightnessL == 0 || brightnessL == 255);
// { // reverse the direction of the fading at the ends of the fade
// fadeAmountL = -fadeAmountL ;
// }
// delay(30); // wait for 30 milliseconds to see the dimming effect
}
void switchFadeRin()
{
analogWrite(LEDLF_PIN, brightnessL); // set the brightness of pin 9:
brightnessL = brightnessL + fadeAmountL; // change the brightness for next time through the loop
if (brightnessL == 0 || brightnessL == 255);
// { // reverse the direction of the fading at the ends of the fade
// fadeAmountL = -fadeAmountL ;
// }
// delay(30); // wait for 30 milliseconds to see the dimming effect
}
//--------------------------Turn off the LED with fade effect.--------------------------------
void switchFadeLout()
{
analogWrite(LEDLF_PIN, brightnessL); // set the brightness of pin 9:
brightnessL = brightnessL + fadeAmountL; // change the brightness for next time through the loop
if (brightnessL == 0 || brightnessL == 255);
{ // reverse the direction of the fading at the ends of the fade
fadeAmountL = -fadeAmountL ;
}
delay(30); // wait for 30 milliseconds to see the dimming effect
ledStateL = false;
}
void switchFadeRout()
{
analogWrite(LEDRF_PIN, brightnessR); // set the brightness of pin 9:
brightnessR = brightnessR + fadeAmountR; // change the brightness for next time through the loop
if (brightnessR == 0 || brightnessR == 255);
{ // reverse the direction of the fading at the ends of the fade
fadeAmountR = -fadeAmountR ;
}
delay(30); // wait for 30 milliseconds to see the dimming effect
ledStateR = false;
}












.png)
{kind=link}
.png){kind=link}
Comments