

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
This project has been discontinued after some failed attempts to achieve some goals! Now it is showcased for educational purposes!
This project is intended for submission of the Contest "Flex Your Mind with Kinetis FlexIO" sponsored by NXP.
The idea is to develop a Robot which will be controlled by NXP Freedom (FRDM-K82F) board which has Kinetis K82F MCU (ARM Cortex M4) and Flexible I/O. The Robot will be powered from a 5 watt on Board Solar Panel (to charge the battery) and 4500 mAh 6 volts maintenance free Lead Acid Battery /2200 mAh 11.1 volts Li-Po Battery.
The thing is suppose to do the following things:
- Drive on the Solar Arrays in straight line and cleaning dusts without falling off, turn again to move to the next line. I have plans to detect Array edge in few different ways: Ultrasonic or maybe Laser Reflection from Panel surface!
- Detect Panel Tilt (panel optimum tilt depends on Latitude of the location) and Orientation (facing towards the sun path) using on board six-axis digital accelerometer and magnetometer.
- Detect Panel Temperature, Hot Spot (a faulty portion of the panel getting overheated), Cleaning level maybe using a OV7670 camera module or a MLX90614 Infrared Thermometer.
- Send report to Control Room (PC/Phone) using maybe NRF24L01/HC Bluetooth/ESP8266 modules.
- Monitor and maintain charging of Robot's battery from solar.
- Motion control, cleaning control using flex I/O.
- Use on board RGB LED, touch slider, user switched for configuring the robot.
I haven't received my freedom board yet! The part of the world where I live, it's possible that I will never receive the board because the postal department might eat it up!
Getting the board on hand is one problem, but being able to use it is another problem. Right now I am going through the documents, datasheets, getting started videos!
Well, I am not sure whether I can Flex My Mind, but I am pretty sure things are Tangling My Mind with Flex I/O right now!
Resources for Getting StartedStart with this freedom K82 board manual to know which pins are connected to RGB LED, switches, accelerometer, jumpers and power options!
To know about Electrical Characteristics (voltage, current, power, frequency etc) of the MCU check this. The K82 Sub-Family Reference Manual (MCU on Freedom K82 Board -K82P121M150SF5) has 2213 pages , which is quite overwhelming for hobbyist.
(Although, I wanted to be an embedded professional but I wasn't good enough). Understanding the peripherals function, configuring their status, control, data registers, writing C codes, reading external components datasheets (ya that's right) and understanding their commands/data - it's not very pleasant from my point of view. Arduino-Only people will definitely cry but endure it - that's the way to become a Pro.
Boring Webinars (but don't skip this):
- Very well explained instruction, 10 times better than the Webinars: Getting Started Videos Freedom K82 Videos
- Blocks Interconnections and Software Configurations (must listen): A better way to learn is to watch Kinetis K Series MCU Online Training
There are APIs (functions) to do things, so you don't need to dig into Register Level of ARM. Check this API guide to understand how to write codes: API Reference Manual
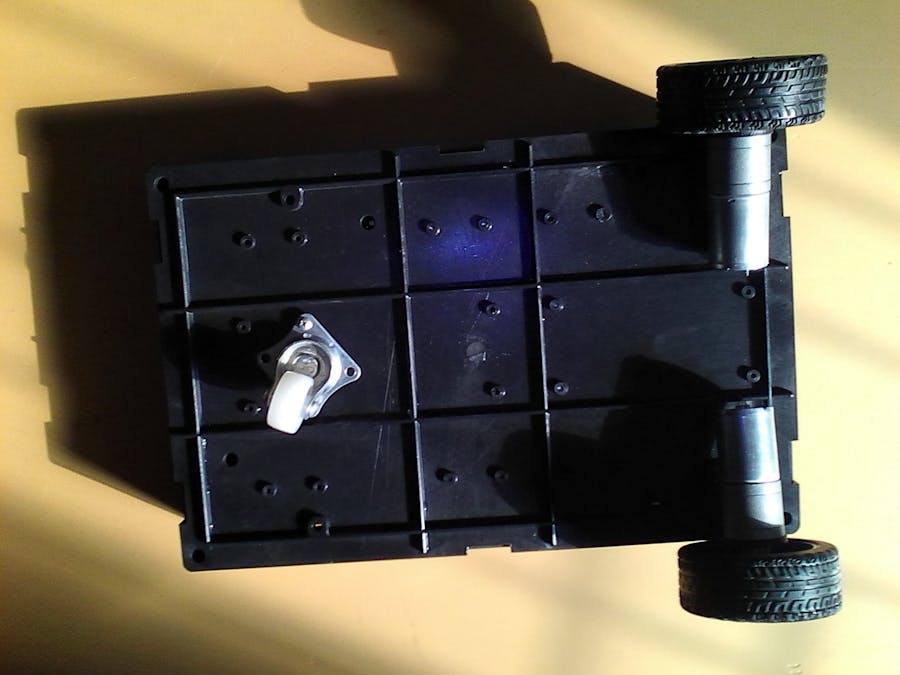
Making of the RobotI have got this nice looking vintage Intercom Box as family heirloom from the 90', which I am going to use as the chassis for the thing.
A 5 Watt, 9 Volt solar panel will cover the top, Freedom board, motor driver, battery will reside inside the box, 4 ultrasonic sensors will be placed on the 4 sides of the thing. Camera, IR temperature sensor, spinning brash are supposed to be placed beneath the chassis.
I must say, I am disappointed with the environment of KDS, real pain in the you know what (for the pro, I have personally met these Over Pride Assembly Guru's - they think the harder the better).
- Turning gear motors with PWM (FTM)
- Cleaning the panel surface with spinning brush
- Using ultrasonic sensors to solar panel edge detect for fall avoidance
- Flex I/O to detect wheel position using rotary encoder
- On board magnetic sensor to drive in a straight line
- OV7670 camera to detect cleanliness of solar panels
- On board Accelerometer to Measure Panel Tilt angle
- Measuring Panel Temperature with MLX90614ESF Infrared Temperature Sensor
- Power Management : Charging Battery from Solar Panel using MPPT converter driven by K82 MCU
- Report information over Bluetooth Serial




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments