

Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
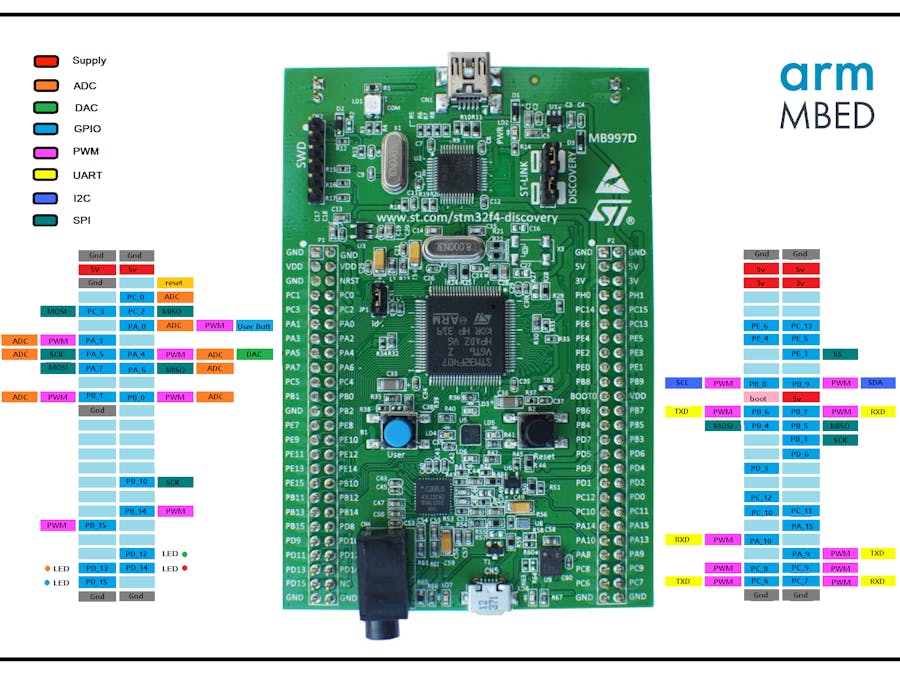
STM32F407 Discovery board does not directly support MBED online IDE. But the mcu on this board is also used in another official MBED board ( Seeed Studio Arch Max v1.1 ) . So, it is possible to program Discovery board by treating it as an Arch Max board.
- It's an easy way for rapid prototyping with online IDE of MBED. No need to install Keil/IAR/AC6 on PC and go through painful setup.
- Common things like ADC/PWM/DAC/GPIO/UART/SPI/I2C can be used with minimum configuration.
- On board accelerometer is also tested.
Attached code below demonstrates all these functionalities.
Step 1: Go to mbed.org and login/signupFollowing code demonstrated GPIO, ADC, Serial, PWM and On board Accelerometer capabilities
Library:
#include "mbed.h"
#include "LIS3DSH.h"GPIO and Pwm Initialization:
DigitalOut rLED(PD_14); // on board red LED, DO
DigitalOut bLED(PD_15); // on board blue LED. DO
DigitalOut gLED(PD_12); // on board green LED, DO
DigitalOut oLED(PD_13); // on board orange LED, DO
PwmOut GLED(PA_9); // on board green LED,
PWMDigitalIn pbSW(PA_0); // on board blue PUSH Switch, active high DISerial and ADC:
Serial serial(PA_2,PA_3); // serial com tx, rx UART
AnalogIn adcPB0(PB_0); // PB0 as 12 bit ADCSerial baud and print:
// set serial baud and print welcome msg //
serial.baud(19200);
serial.printf("Welcome to STM32F407 Development with mbedOS \n\r");PWM Frequency and Duty Cycle:
GLED.period(1.0f/freq); // set pwm period
GLED.write(duty/100.0f); // set pwm duty cycleLED Blink:
rLED = 1;
gLED = 1;
wait(delay);
rLED = 0;
gLED = 0;
wait(delay);ADC Read:
// adc value read //
adcval = 4095*adcPB0.read_u16()/65535; // 12 bit valueJust tested 12 bit DAC on A4 and A5 pins. It works. But, Accelerometer and Audio might not be used along with DAC for other application (same pin).
DAC Setup:
// Before main
AnalogOut dac1(PA_5);
AnalogOut dac2(PA_4);Output Analog Voltage:
// set up 1 volt on dac 1
dac1 = 0.333f; // vdd* 0.333 = 3.0*0.333 = 1.0 volt
// set up 1.5 volt on dac 2
dac2 = 0.5f; // vdd*0.5 = 1.5 voltTested lcd display with mbed, working great ! 5 volts display runs with 3.3 v logic without issues. Code link below :
https://os.mbed.com/users/suntopbd/code/STM32TextLCD_HelloWorld/
CaveatsNot all functions will work according to above pin map. For example Pwm on PD13 will not work when programmed with mbed. Because, mbed compiler treats the code according to Arch Max boards pin mapping.
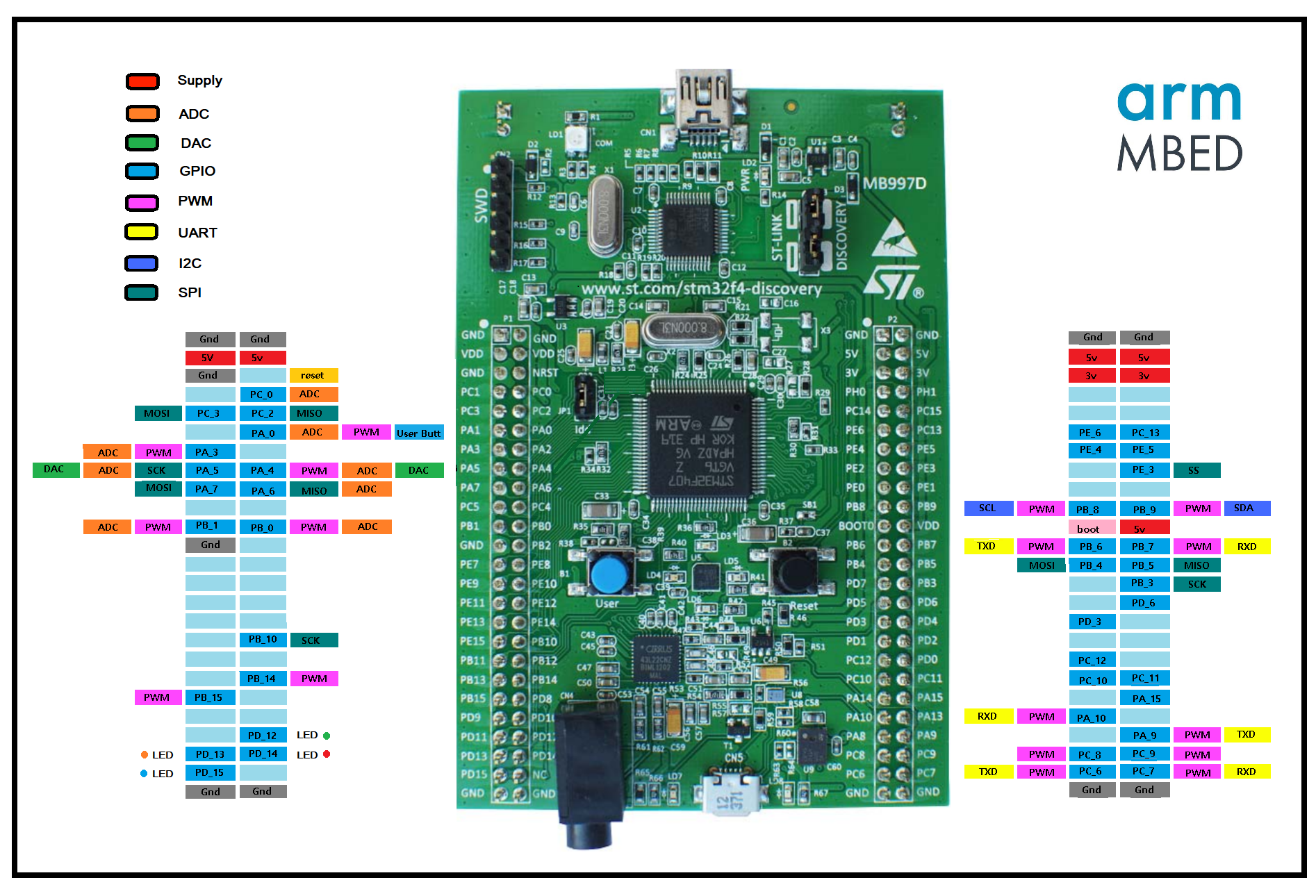
For, pin specific function that will work for sure, see the pin map attached below.
Also, flash memory might be limited to 512 kB instead of full 1 MB.


{kind=link}
Comments