
Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
 |
| |||||
| ||||||
 |
| |||||
 |
| |||||
This project has been on my mind for months I found a bracelet on Thingiverse made out of gears which I immediately. printed and began wearing and playing with it. its more of a fidget toy something you can turn with your hands, but then I thought, why not add a motor? So I did and the result has been amazing.
Step #1: Print the BraceletThe bracelet is very easy to print, I sally print it flat, on the print bed with supports. for sizing, I recommend measuring your wrist and making the bracelet about 2 or 5 inches bigger then your wrist, for other humans like myself who have strange wrist, make it as big as you need to, just note you need to fit in the components, and the left over room can be fixed with foam.
Once you print the bracelet it will have a lot of supports on it, and some of the supports will be in the gears making it impossible for them to move. to fix this mess of a problem I recommend grabbing a X-acto knife, and slowly and carefully begin cutting off the supports and slicing the supports off the gears. To help with the process I recommend slowly and carefully, after you cut the supports off and around the gears slowly try rotation them, but BE CAREFUL you don't want them to break.
Step #3: TestAfter the gears are good and ready make sure to twist the gear knob to loosen them up a bit. Just keep spinning it until it feels pretty smooth.
Step #4: DremelSo this is where things get interesting. There is a visible whole in the knob gear, using a Dremel, or any fast spinning device, and drill through the knob gear till it comes off. Try to make the whole in the bracelet a bit bigger cause it's where the servo going to go.
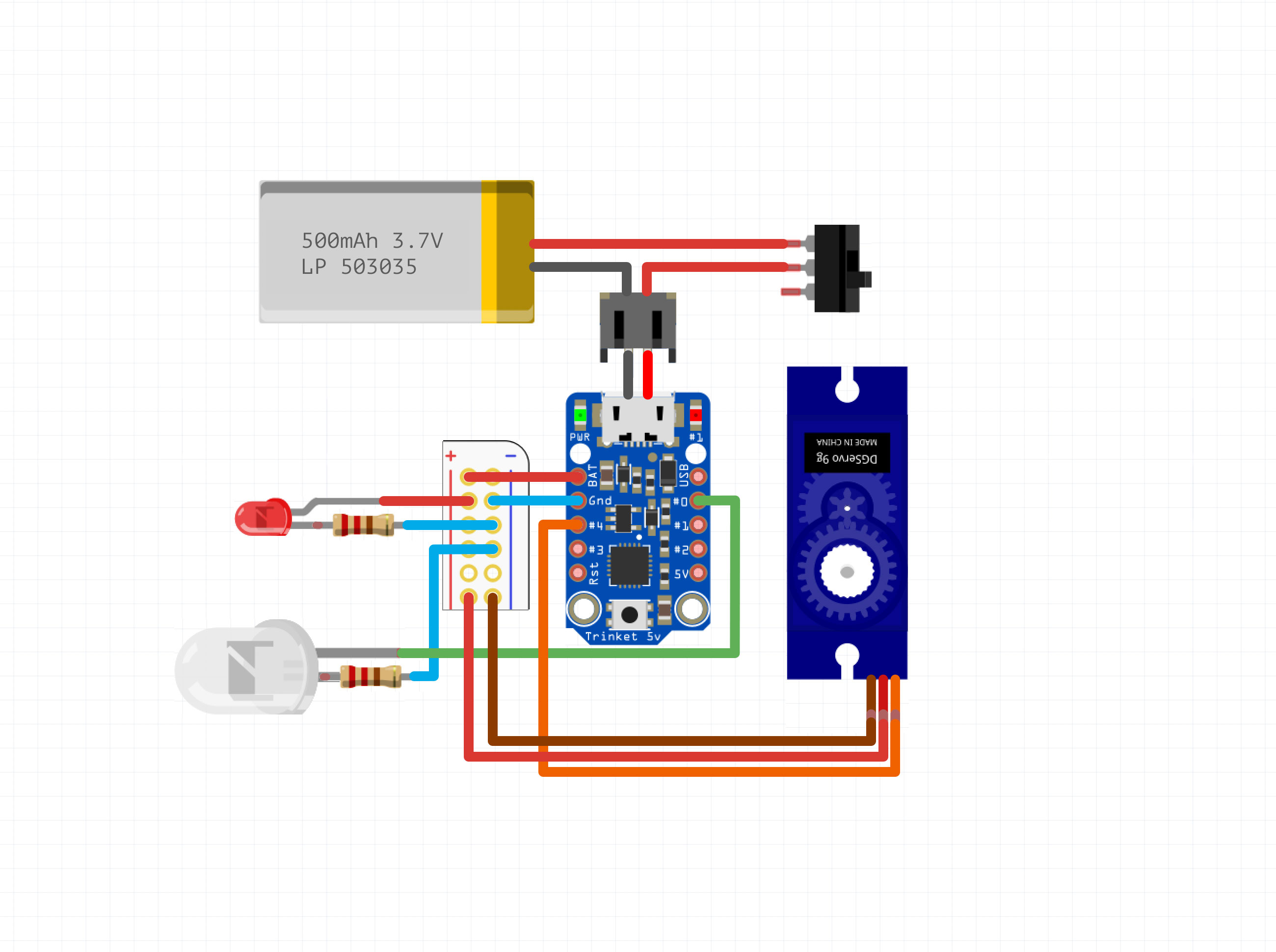
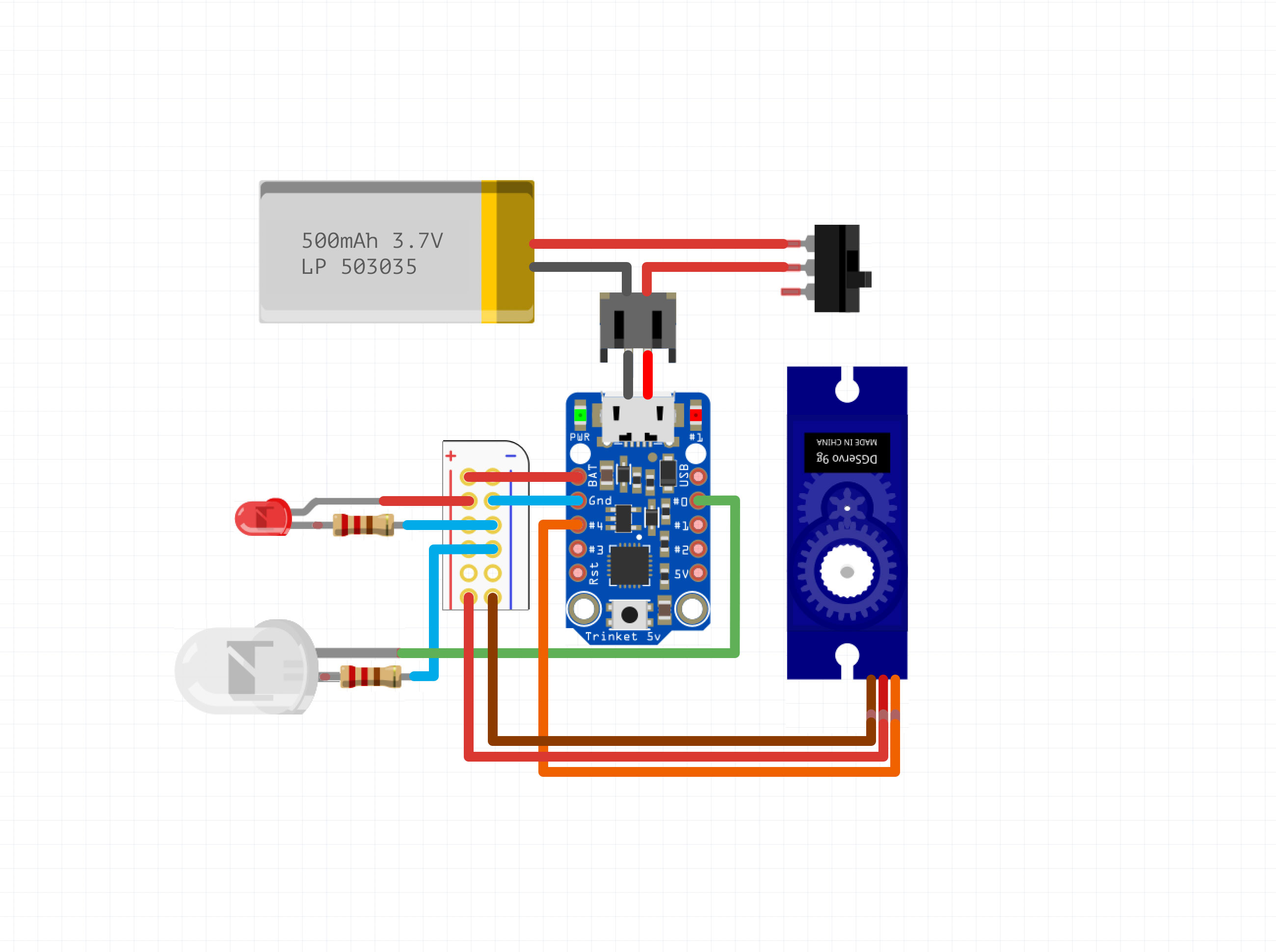
The circuit is pretty simple:
The only thing is that I just took out the LEDs and wired the servo directly to the board. I also added a switch for on and off.
Step #6: Print EnclosureIt's shaped to fit with the bracelet and you should be able to easily glue it to the side.
Step #7: AssemblyThis is pretty much what you should have after following the guide thus far. Shove the controller and wires into the container and glue them.
Make sure you wire the on/off switch on the outside of the container. And if you want to laser cut some foam and glue it to the inside to help hold the bracelet on your wrist.





{kind=link}
{kind=link}
Comments