


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Hey Jayy here, your Favorite Oddity, I made these goggles for fun during a tough time, They became really popular making it on the cover of MAKE magazine issue 76. I was planning to use this build and try going into more of a business. But that's just not me. so I decided to make them open source and share them with the community.
Step 1: Print parts
Printing the parts should not be too hard when you have a 3d printer, I have sized everything for my creality Cr-10 but the files should fit most printers. I recommend starting with the “lens base” and “Servo Goggle Holders”
After these parts Are finished, you will want to glue them to the goggle frames using the 6000, glue. I chose this glue because it's strong and flexible. I also recommend having some clips to hold down the parts.
Quick Hint before you start glueing make sure the Lens base pointers are sitting at 1 o'clock and 11 o’clock (or 135 degrees and 45 degrees for you technical people) this way the actually eyebrow will move correctly trust me I have glued them wrong before and had a mess. Added a quick sketch if you’re more of a visual person like myself
After that Make sure everything is clipped and let it dry overnight.
Step 2: Lens
This is probably the hardest part, I got the original design from thingiverse (https://www.thingiverse.com/thing:2019585)But I did alter the size and thickness for my project. 1st thing you want to do is print out the lens parts.
After you print the parts out you will have to carefully insert the leaves into the holes. Be patient and you may need to file the hole a bit to get them to fit easily. Once you have them insert you fold them in and insert them into the lens. This part may take some time and maybe a bit frustrating at moments but your patience shall be rewarded.
Next you wanna Glue the Iris on top of the Lens Base using the E6000. You want to make sure that the pull switch is facing down and moving to open by going to the side. I drew a sketch just in case my wording is confusing.
Let it Dry overnight to make sure everything stays.
Step 3: Eyebrows and testing
After everything is glued on and secured, I recommend doing a testing, Print out the eyebrow parts, and the pulley hinges.
Attach the Eyebrows with the back hole facing outward, and use screws to attach them (Honestly don't know what size screws I kind of recycle screws into projects)
and grab 2 hobby servos. Attach the pulleys to a hobby servo horn and insert the servo’s into the servo holders, screw them in if you can. They should look something like this.
Next I recommend taking any board you can use to test the servos, and testing the movement moving 0 to 180 degrees. It should move kind of like this.
If it works then you can continue to the next part of the build.
Step 4: Preparing goggles and making boxes
I recommend starting the print for the Circuit cups, these will hold the circuit and the battery for the Goggles
OK here we get clever, so there is a wire on the inside of the goggles that will connect the two circuit boxes. I recommend taking a Dremel or some type of cutting instrument and making a small hole right behind the servo holder. Next after the Circuit cups have been printed, you shall want glue then to the back of the Servo Holder like so.
I recommend making sure some wire is through, you will need it for the power and maybe the servo as well.Of course let it dry overnight.
Step 5: Electronics
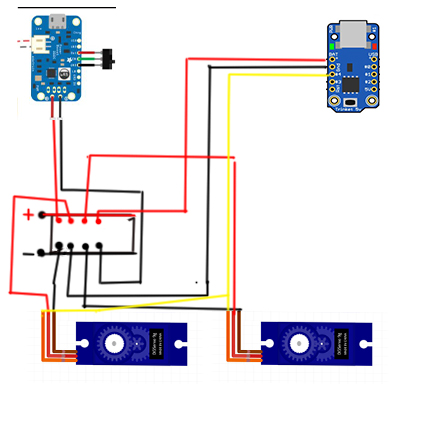
1st add the code to the Adafruit trinket. It's very Important.So this is where your tinker/Maker skills come though the diagram for this is a bit weird I daisy chain the signal wires from the Adafruit trinket, here is a quick diagram I drew up
Next You will want to stick the power booster and the battery Lithium Ion, into one cup and the trinket and perm aboard packed into he other
The program should be already Uploaded onto the trinket. You can stick the switch outside the circuit box of the batter holder, Screw in the covers to the circuit cups on and you’re done.
ExtraI made extra parts for Aesthetic reasons, these are the parts you can print for color designs, these parts can be glued to the eyebrows and the end of the lenses, I print them in different colors so they can look super coolThe program should be already Uploaded onto the trinket. You can stick the switch outside the circuit box of the batter holder, Screw in the covers to the circuit cups on and you’re done.



{kind=link}
Comments