Before we started I want remind you that this project is very dangerous and can cause damage and injuries. Please don't try this if you are not sure what you are doing. If you do try this, please be careful and use precaution. The results at your responsibility. Please don't use this project to harm others.
THE IDEAThe idea is to make a mini defense weapon that is automatically aimed and fired at targets that are detected by sensor. the sensor detect targets only when its approaching/ in a certain distance from the sensor.
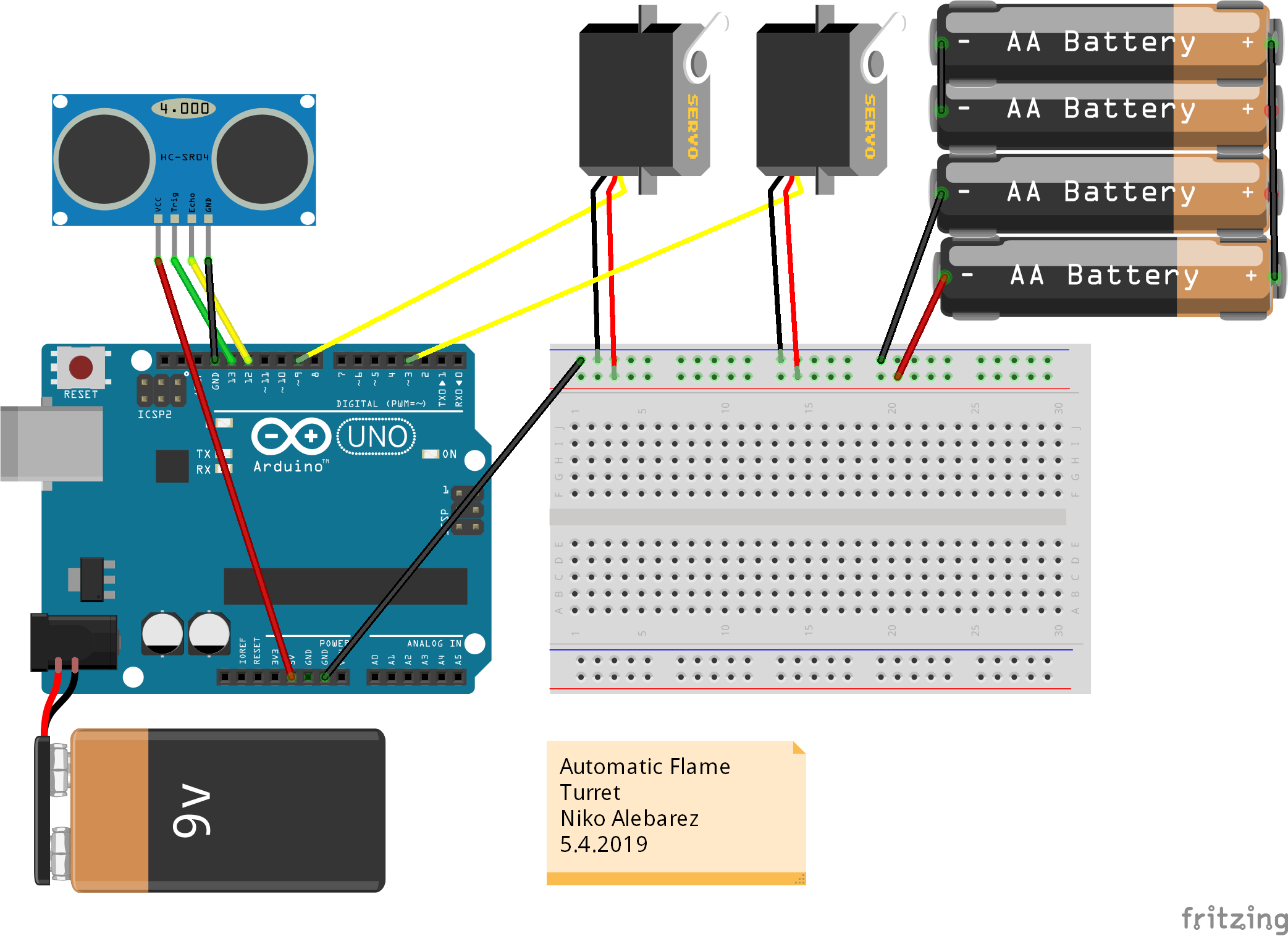
GETTING STARTEDThe electronic components used in this project:
- Ultrasonic Sensor HC-SR04
- 2 Servo Motors (im using the futaba s3003s)
The non-electronic components:
BUILD VIDEOHOW IT WORKSHow does this thing work? so basically there are two servo motors. The first servo as the neck is used to rotate the other servo so it looks like it's lurking. The second servo as the head is used to press the trigger in the modded gas lighter so it shoots Liquified Butane Fuel. This Liquified Butane Fuel is flammable, so placing the arc lighter in front of the fuel makes the fuel burn when it shoots out. BOOM!. Instead of continuous burst I decided to making it fire single shots so its a lot safer and the fuel doesn't run out quickly. The ultrasonic sensor detect approaching objects and shoot a single shot continuously until the objects is out of reach of the sensor.
NOTE- Use the external 4x AA batteries to power the servos because the arduino board is not designed to power 2 servos.
- The arc lighter only lights up in a very short time.
That's it for this project that I made myself.I have put my best effort and time into this. I hope this can be useful in the future. and sorry for my bad grammar. :-) Thank you!



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












{kind=link}
Comments