


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
Ever found yourself struggling to measure ingredients accurately while cooking or baking? A tiny miscalculation can make or break your recipe! That’s why I’m building a DIY Nirmal Kitchen Scale—a compact, reliable, and easy-to-use weighing device designed to make cooking more precise and effortless.Whether you're baking a cake, portioning ingredients for a diet plan, or experimenting with new recipes, this smart kitchen scale ensures accurate measurements every time. Unlike traditional scales, this one is custom-built, making it affordable, customizable, and easy to repair. Plus, with a case designed in Fusion 360, it blends style and functionality, making it a great addition to any kitchen.Also comes with a tare feature, it means when you add a weight on scale and press the tare button, the weight will be display 0 gram, it's a best feature when you have to add a bowl and weight anything without weighting the bowl. It's a capibal of weight around 20kg, which makes it a best kitchen corporation for weighting anything.In this project, I’ll show you how to build this scale step by step, from designing the enclosure to integrating the electronics. Get ready to upgrade your kitchen experience with a DIY gadget that’s both practical and fun to make!
Step 1: CAD & 3D PrintingTo begin, I designed this diy digital weight scale case using Fusion 360. For 3D printing, you can directly download the STL files listed below:
For the 3D printed parts of this project, I used JLC3DP 3D printing service, which is gaining popularity for its high precision, wide material selection, and affordable pricing. They offer industrial-grade printing technologies like SLA, SLS, MJF, and FDM, delivering smooth, accurate, and durable parts suitable for both prototypes and final products. One of the best things about JLC3DP is their fast turnaround time and reliable global shipping, making it easy to get quality parts quickly. Whether you're a hobbyist or a professional, their platform is super convenient. Overall, JLC3DP offers a reliable and budget-friendly solution for anyone working on 3D printed projects. Use this link to get a huge discount on your order.
Step 2: Display AssemblyFirst place the 1602 lcd display to its slot, be careful while placing the display on its slot, make sure your putting a little bit of force, so that I can fit on it's slot.Now Connect four wire to display, I used 26 awg Silicon wire for better results.
- Red (VCC)
- Black (GND)
- Yellow (SCL)
- Green (SDA)
Now let's assemble the load cell on case, first use two M3 Screw to Mount it on bottom case. Use a Allen key to screw the M3 Screws. Now place the pan on top and use two more M3 Screw to screw it tight. Make sure everything is tightly screwed. Also make sure that you have screwed the load cell on its right side and angle. There will be a sticker on load cell, which indicates it's position.
Step 4: Switch AssemblyNow place the switch on its slot, there're two types of switches. One is on/off Switch and 2 pcs push switch. Place the switch on its slot at one by one. Use a little bit of super glue to fix it on its slot.
Step 5: Microcontroller SelectionTo control this project, you need a Microcontroller, it works like a brain of this project. You can even use an Arduino Nano, but here I'm using DFRobot firebettle 2 esp32c6 because it's faster than Arduino Nano and it has a on board lithium battery charging Chip. So I don't need to add an extra charging module to charge the battery. Making it perfect for this diy project.
Step 6: ConnectionNow let's do the connection of all components. Since I haven't a laptop so that I can draw a schematic in fritzing to show you. Here I'll try my best to let you know everything about connection.
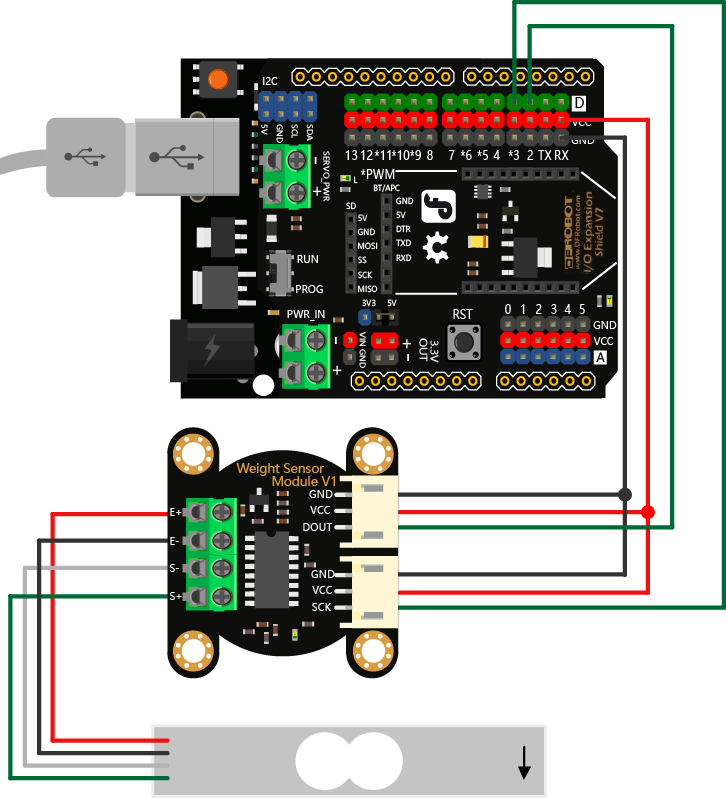
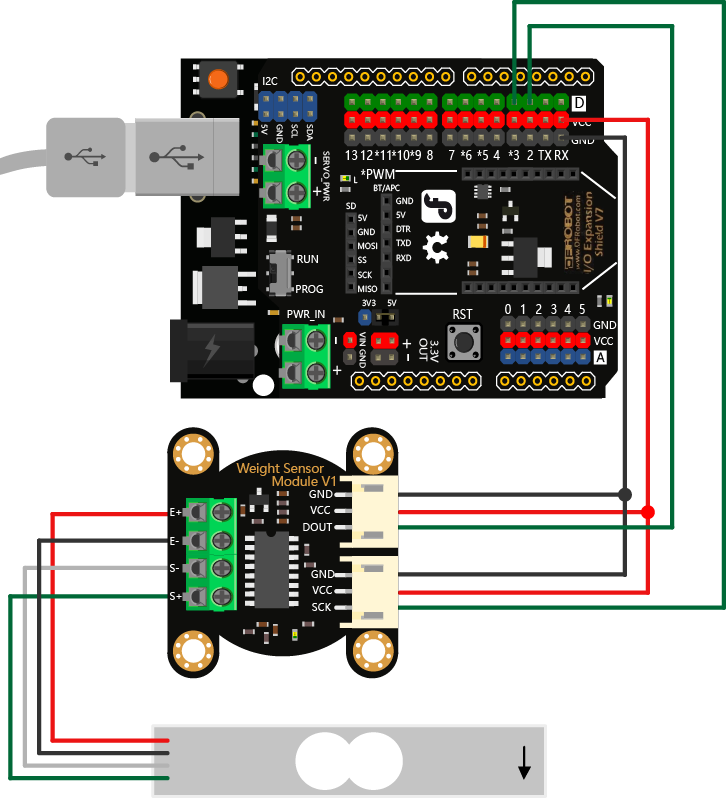
Here's the connection between load cell and HX711 Sensor.- Load Cell (Red Wire) TO HX711 (E+)
- Load Cell (Black Wire) TO HX711 (E-)
- Load Cell (Green Wire) TO HX711 (A-)
- Load Cell (White Wire) TO HX711 (A+)
- HX711 (VCC) TO Firebettle 2 ESP32C6 (VCC or 3.3v or 5v)
- HX711 (GND) TO Firebettle 2 ESP32C6 (GND)
- HX711 (DT) TO Firebettle 2 ESP32C6 (GPIO 2)
- HX711 (SCK) TO Firebettle 2 ESP32C6 (GPIO 3)
Here's the connection between LCD 1602 Display and DFRobot firebettle 2 ESP32C6.
- 1602 LCD (VCC) TO Firebettle 2 ESP32C6 (VCC or 3.3v or 5v)
- 1602 LCD (GND) TO Firebettle 2 ESP32C6 (GND)
- 1602 LCD (SCL) TO Firebettle 2 ESP32C6 (GPIO 7)
- 1602 LCD (SDA) TO Firebettle 2 ESP32C6 (GPIO 6)
Here's the connection between push switch and DFRobot firebettle 2 ESP32C6.Connection of first switch, which is a calibration button.
- One Side of Switch TO Firebettle 2 ESP32C6 (GPIO 4)
- Second Side of Switch TO Firebettle 2 ESP32C6 (GND)
- One Side of Switch TO Firebettle 2 ESP32C6 (GPIO 5)
- Second Side of Switch TO Firebettle 2 ESP32C6 (GND)
Connection of battery with microcontroller is very simple, just connect the battery to the microcontroller, there're already two polarity marked on it plus and minus. Plus for positive and black for negative. Also a connection of on/off Switch is simple, just connect it between the power output and you're done!Step 7: Rest Components Assembly
Now only few components are left to assemble, Since there's no dedicated space for the HX711 sensor and microcontroller & lithium battery, a simple trick works best! Just add a small piece of double-sided tape to the bottom panel and firmly place both components on it. This keeps them secure without any extra hassles.Step 8: Final AssemblyNow that everything is in place, it’s time for the final touch! Align the back panel carefully and secure it using screws. Make sure everything fits snugly, and don’t overtighten the screws. Once done, give it a quick check to ensure everything is secure. You can use a rubber pads for more attractive looking and long term use.Step 9: Uploading CodeTo upload the code, I faced too much struggle because I haven't a laptop. Although my struggle came up with this result, I wrote a code for this project.Install lattest Arduino IDE: Download and install the latest version of Arduino IDE from the official Arduino website.Adding the ESP Board: Open Arduino IDE and go to File > Preferences. In the Additional Board Manager URLs field, add the ESP32 board URL:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.jsonNow, go to Tools > Board > Boards Manager, search for ESP32, and install it.Install Required Libraries: Before uploading the code, install the necessary libraries. Open Sketch > Include Library > Manage Libraries. Search for and install the following:
- Liquid crystals i2c
- HX711
Upload the Code: Open the provided code file in Arduino IDE. Select the correct Board and Port from the Tools menu. Click the Upload button and wait for the process to complete. After few seconds you'll get a message of done uploading!
Step 10: CalibrationIn the code, I have put the auto calibration process, it means you don't need to put the weight value in code and upload it again. Just upload the code at once. The weight scale has an automatic calibration for 500g, but you can also manually calibrate it using the push switch. Press and hold the calibration button for a few seconds. The display will prompt you to place a known weight. Put a precise weight (e.g., 500g standard weight) on the scale. The system will adjust itself and store the calibration data.After calibration, if the display shows small variations, use the Tare button to reset it to zero. Now, your scale is accurately calibrated and ready to use.Step 11: TestingBefore using the DIY Nirmal Weight Scale, it's important to fully charge the battery. Since I used DFRobot firebettle 2 ESP32C6, it has a on board lithium battery charging Chip. allowing for convenient and efficient charging. Simply connect it to a power source via the built-in charging port, and once the battery is charged, the green led on microcontroller will be glow & the scale will be ready for use.During testing, the scale performed exceptionally well, providing accurate and consistent weight measurements. It successfully handled various kitchen ingredients, ensuring precision for cooking and baking. The display was clear and easy to read, and the overall response time was quick and reliable.This thorough testing process confirms that the Nirmal Weight Scale is not only functional but also a dependable kitchen tool for everyday use.
Step 12: ConclusionIn my conclusion this diy Nirmal Weight Scale is a perfect addition to any kitchen, designed with precision and efficiency in mind. Using Fusion 360, I created a sleek and functional case that enhances both durability and aesthetics. This weight scale ensures accurate measurements, making it a reliable companion for precise cooking and baking.With its compact design and user-friendly interface, it seamlessly integrates into any kitchen setup. Whether you're a professional chef or a home cook, this DIY project offers a cost-effective and practical solution for maintaining consistency in recipes.By building this scale, you not only improve your cooking experience but also gain valuable insights into electronics, and DIY innovation. I hope this project inspires you to explore more creative and functional builds for your kitchen. Happy cooking!



_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments